
Приложения

Применение датчиков скорости вращения колес в инерциальных навигационных системах (ИНС) в основном проявляется в объединении данных от нескольких датчиков и коррекции ошибок, особенно играя важную роль в навигации транспортных средств. Инерциальные навигационные системы (ИНС) в основном полагаются н...
ЧИТАТЬ ДАЛЕЕ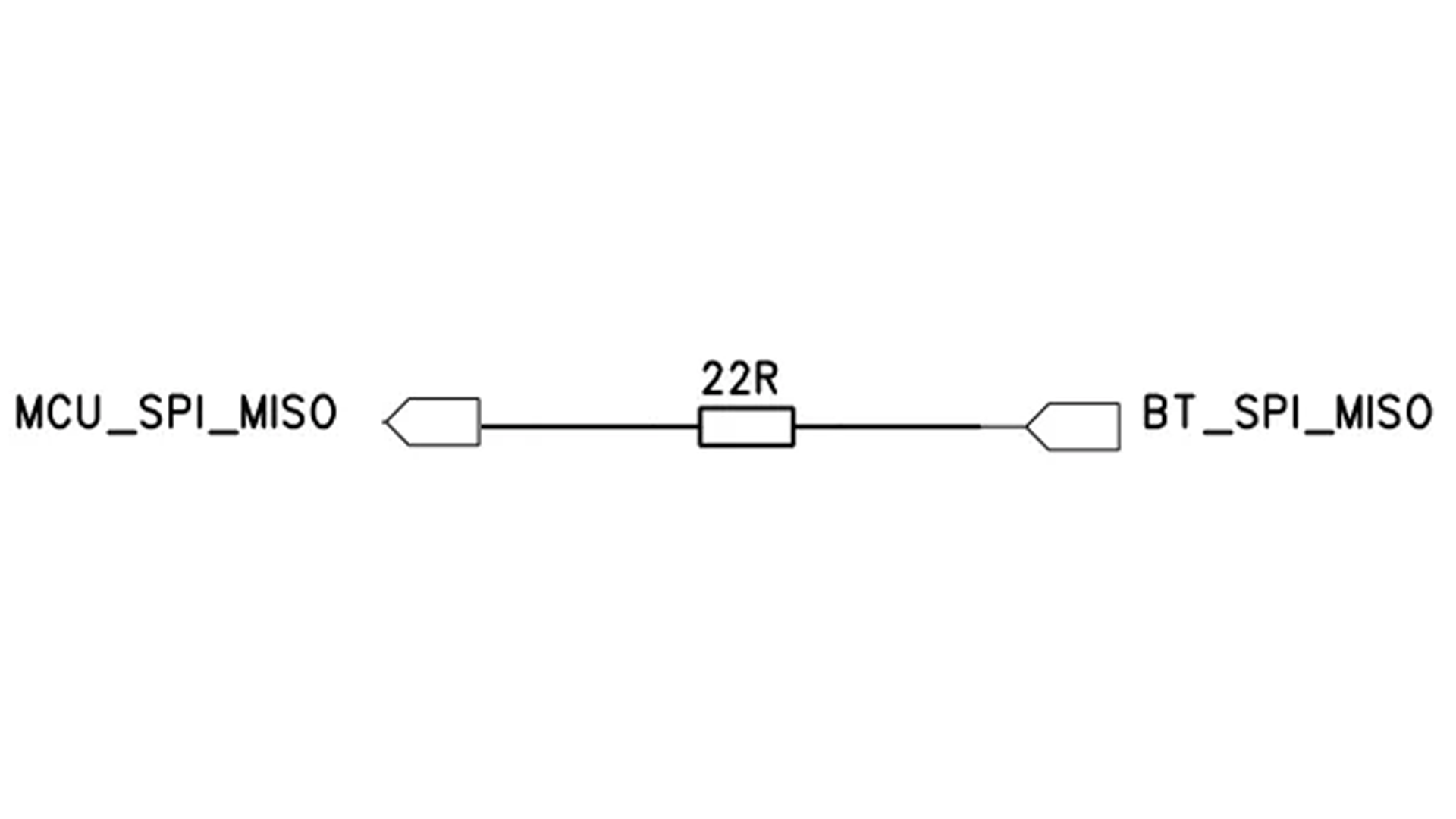
В схемах, используемых для связи по шине SPI с периферийными устройствами, небольшой резистор с сопротивлением в десятки Ом обычно подключается последовательно с сигнальной линией, как показано на рисунке 1. Такая конструкция обеспечивает выполнение следующих функций:1. Согласование импедансов. Когд...
ЧИТАТЬ ДАЛЕЕ
Инерциальные навигационные системы (ИНС) играют решающую роль в технологиях автономного вождения, особенно в преодолении ограничений других датчиков, таких как GPS, камеры и LiDAR. Они обеспечивают непрерывную, высокочастотную и непрерывную информацию о состоянии движения и являются одним из основн...
ЧИТАТЬ ДАЛЕЕ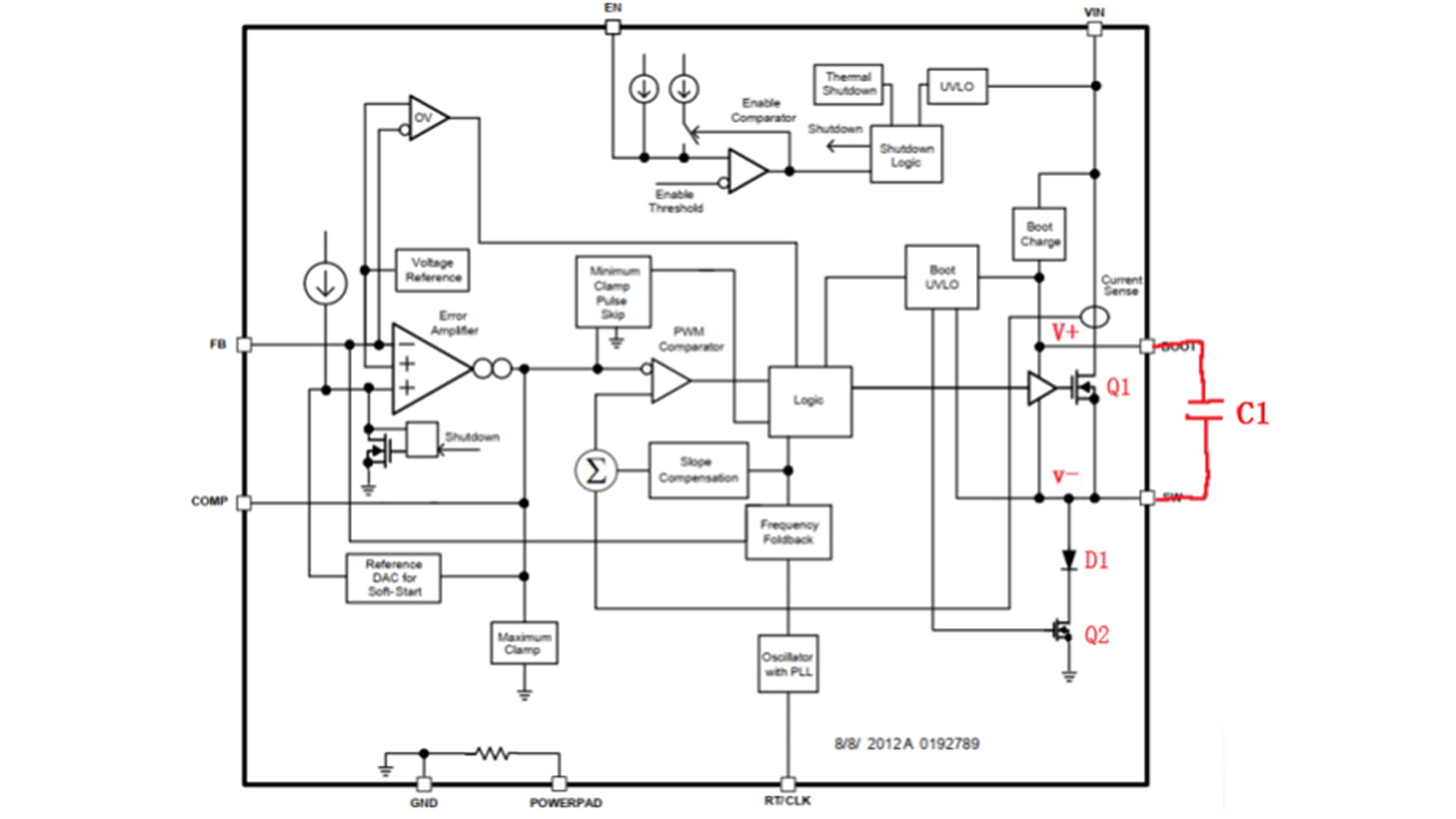
Рисунок 1. Источник питания BUC.Как правило, при проектировании асинхронного понижающего источника питания между выводами SW и BOOT микросхемы подключается бутстрепный конденсатор, например, C1 на рисунке 1. Бутстрепный конденсатор использует свойство, заключающееся в том, что напряжение на нем не м...
ЧИТАТЬ ДАЛЕЕ
При проектировании высокоточных систем измерения наклона контроль ошибок является ключевым фактором, определяющим производительность системы. В данной статье, объединяя результаты существующих исследований и инженерную практику, рассматриваются методы реализации, источники ошибок, методы анализа и р...
ЧИТАТЬ ДАЛЕЕ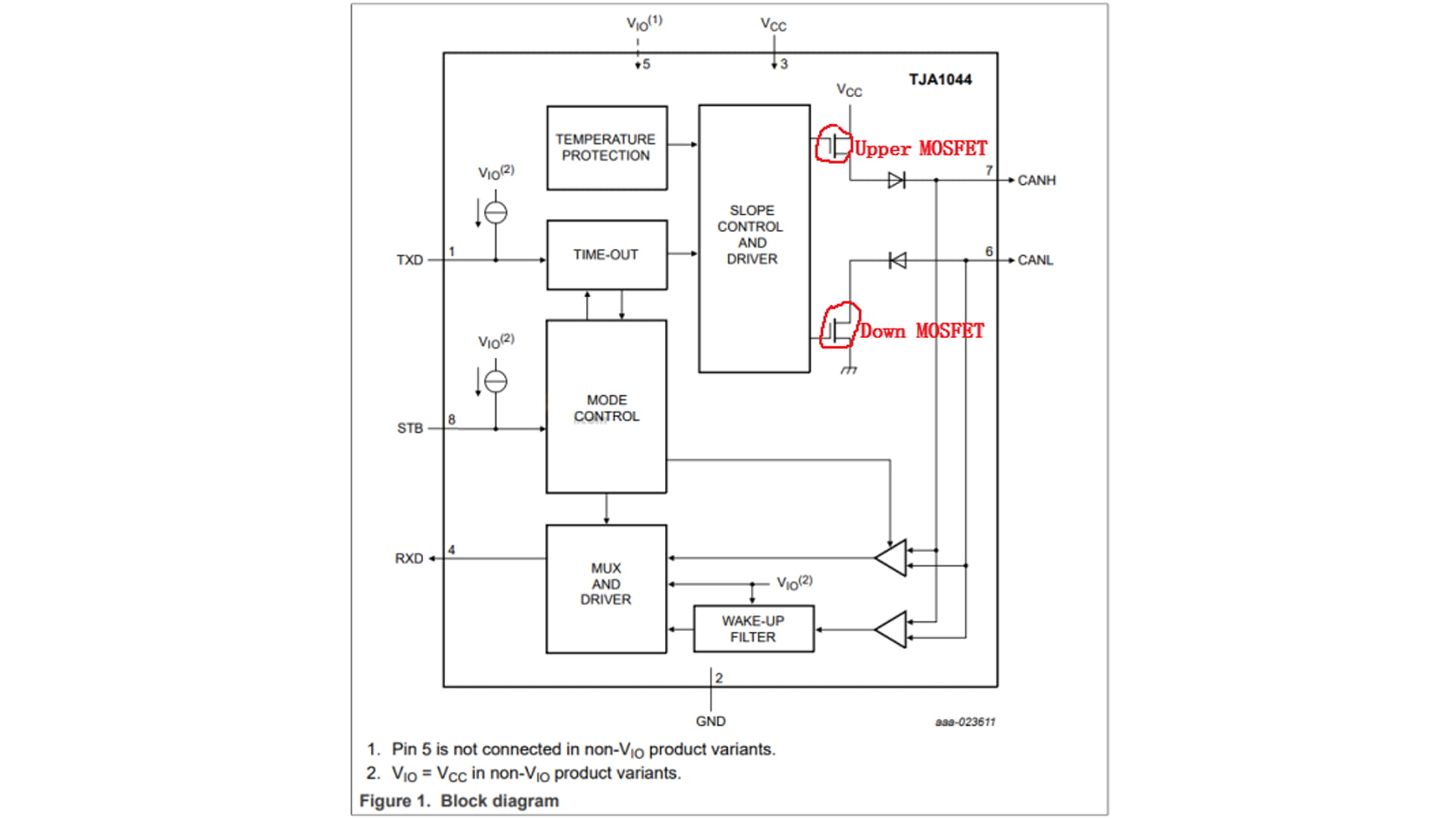
В практическом использовании шины CAN, как показано на рисунке 1, на обоих концах шины необходимо подключить резистор сопротивлением 120 Ом. Так для чего же предназначен резистор на 120 Ом?Рисунок 1Ниже в качестве примера для анализа мы рассмотрим внутреннюю архитектурную схему микросхемы TJA1044.Ри...
ЧИТАТЬ ДАЛЕЕ
Компания Micro-Magic Inc. выпустила высокоточный инерциальный измерительный блок UF300, специально разработанный для навигационных систем. В основе устройства лежит передовая технология волоконно-оптического гироскопа, сочетающая в себе высокую точность, миниатюризацию и высокую надежность. Он спец...
ЧИТАТЬ ДАЛЕЕ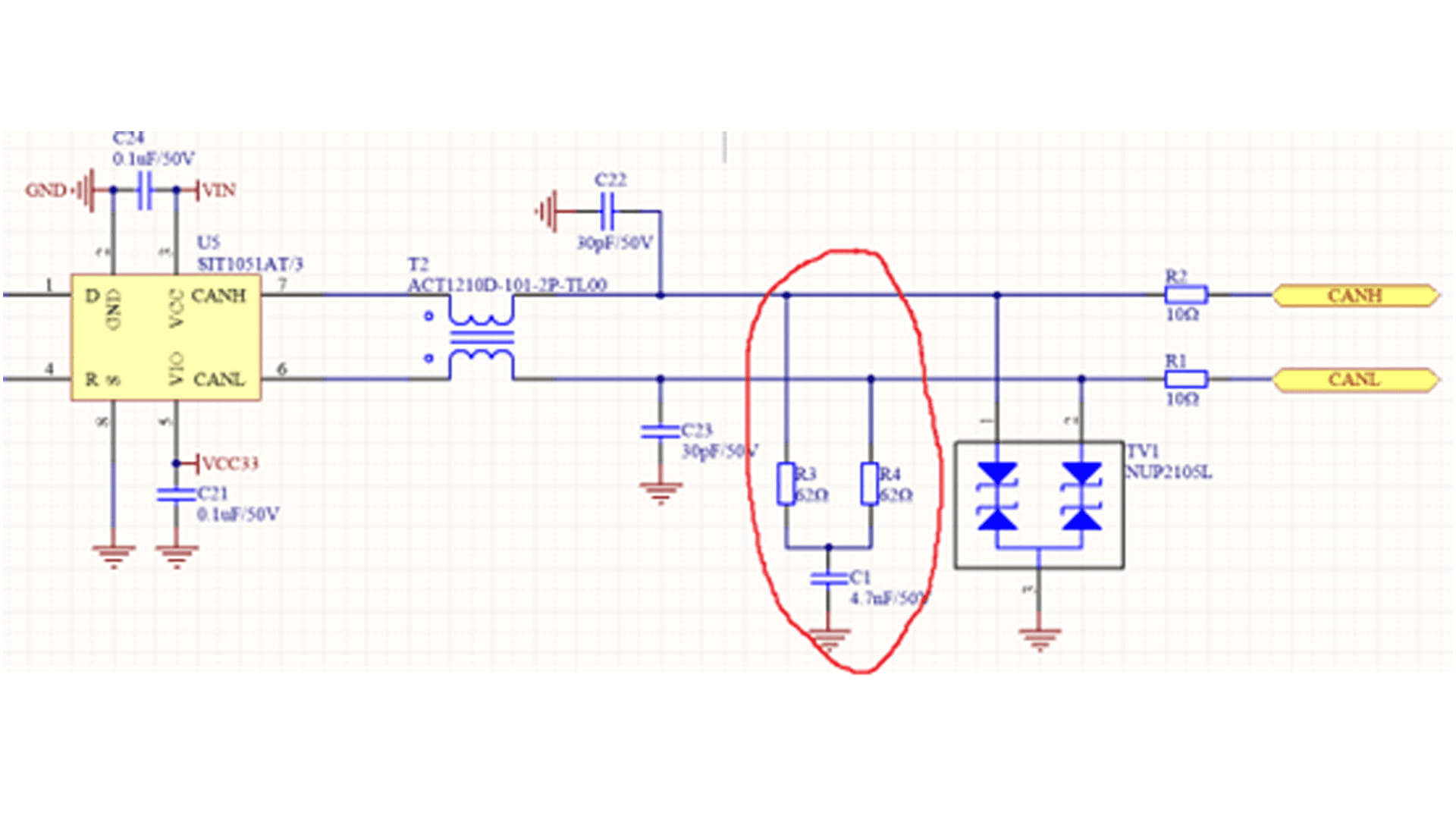
Схема, показанная на рисунке ниже, часто встречается в системах CAN-связи: резистор на клемме CAN не использует напрямую сопротивление 120 Ом. Вместо этого между двумя резисторами по 62 Ом добавляется заземленный конденсатор, который «разделяет» резистор на две части, что и называется методом раздел...
ЧИТАТЬ ДАЛЕЕ
В сложных и постоянно меняющихся областях промышленности и исследований точность и надежность навигационных систем напрямую определяют успех или неудачу в выполнении задач. Высокоточная волоконно-оптическая инерциальная навигационная система серии IF3900, разработанная компанией Micro-Magic Inc., бл...
ЧИТАТЬ ДАЛЕЕ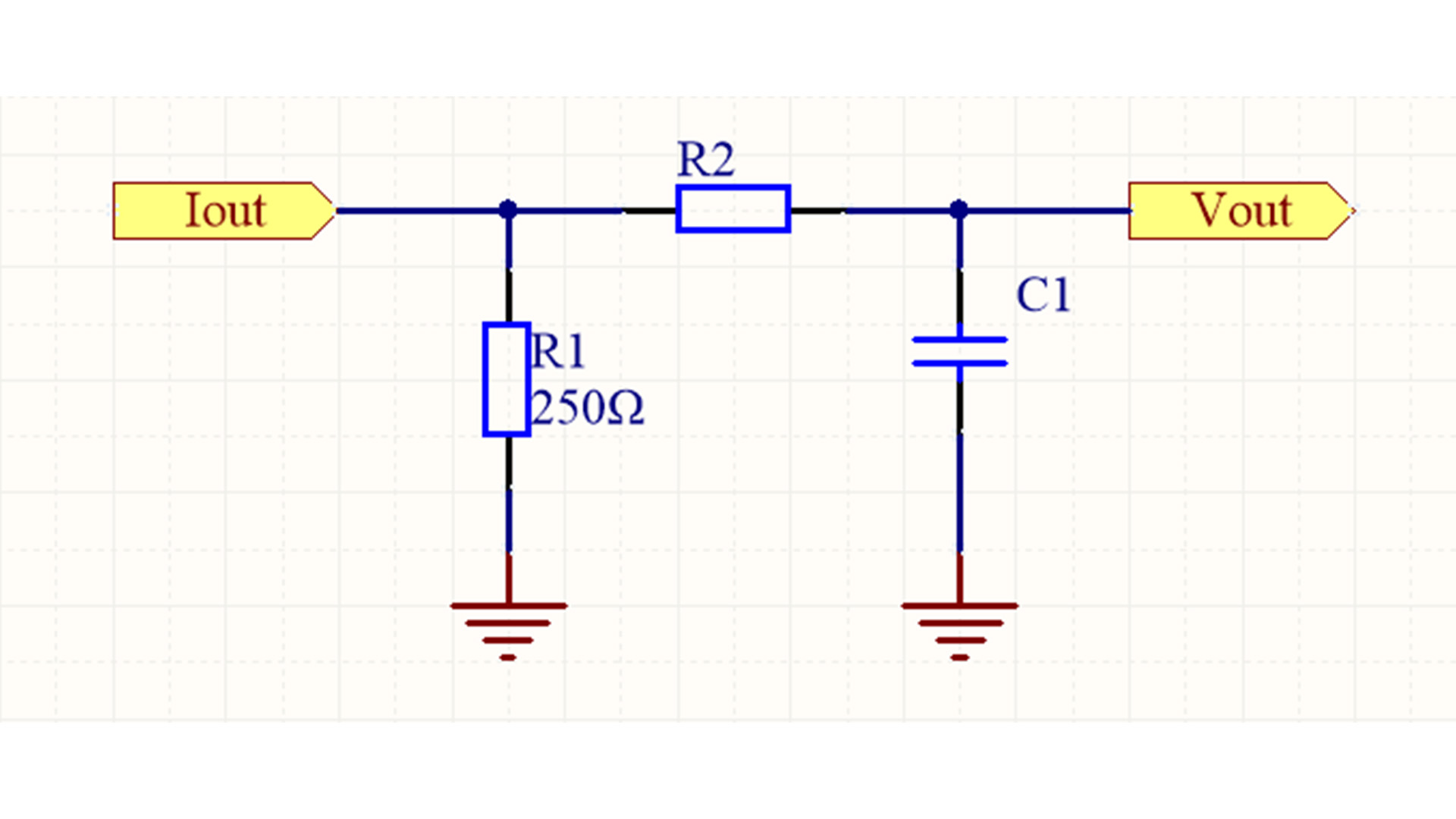
В предыдущей статье упоминалось, что для подавления влияния высокочастотного шума в схему выборки тока 4-20 мА необходимо добавить RC-фильтр нижних частот перед выборкой АЦП. Используется схема RC-фильтра нижних частот, показанная на рисунке 1, где R2 равно 1,6 кОм, а C1 равно 0,1 мкФ. Тогда частота...
ЧИТАТЬ ДАЛЕЕ
В Китае достигнут значительный прогресс в области инерциальных технологий — компания Micro Magic Inc. недавно объявила об успешном применении своей высокопроизводительной инерциальной навигационной системы IF3700 на ведущей в отрасли платформе высокотехнологичных промышленных дронов нового поколения...
ЧИТАТЬ ДАЛЕЕ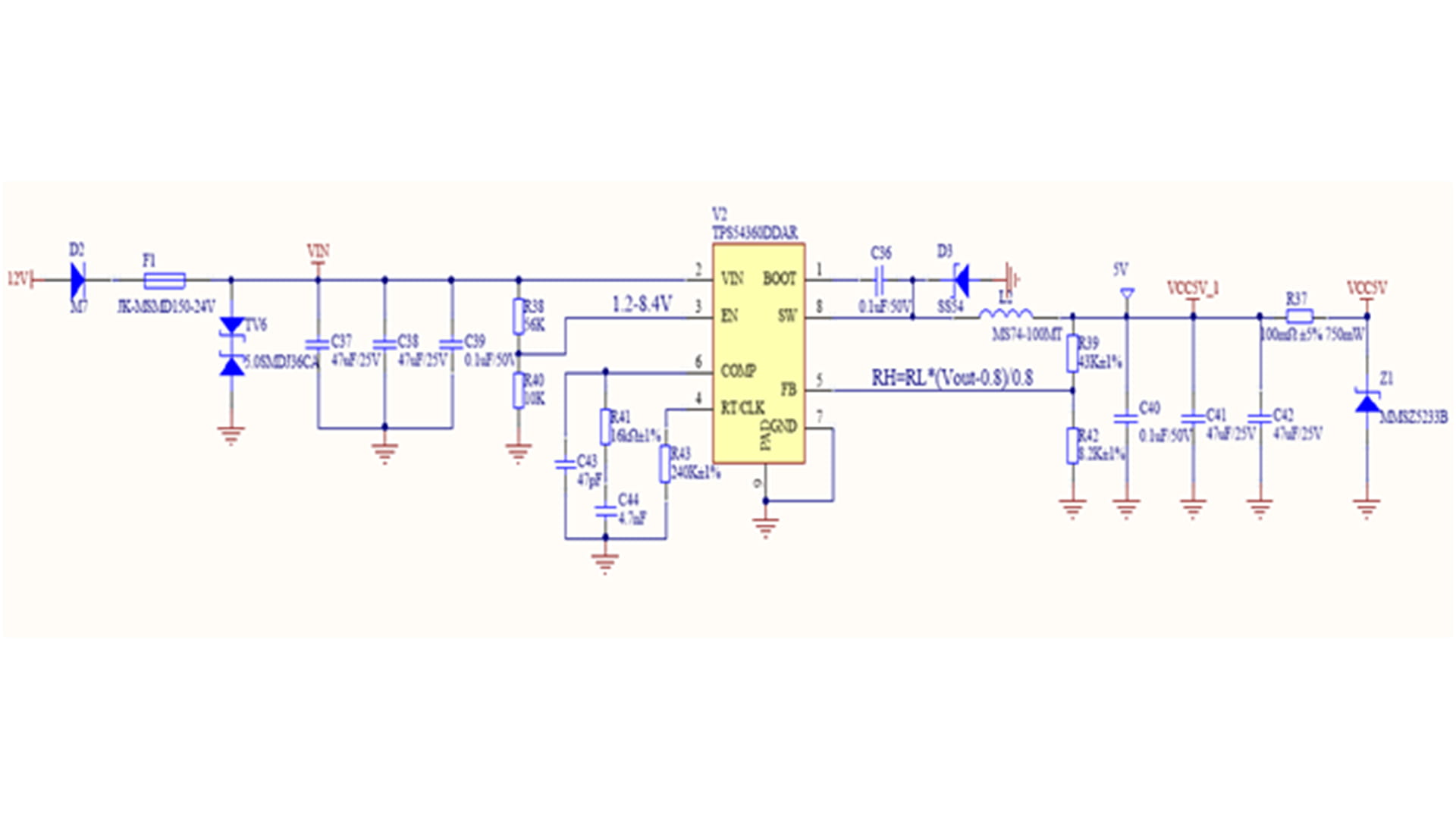
Рисунок 1. Топология несинхронного понижающего преобразователя (BUCK).На рисунке 1 показана топология асинхронного понижающего преобразователя (BUCK). Микросхемы асинхронных понижающих преобразователей обычно интегрируют внутри только верхний MOSFET. Между выводом SW и GND необходимо установить диод...
ЧИТАТЬ ДАЛЕЕ
Xml политика конфиденциальности блог Карта сайта
Авторские права @ Микро-Магия Инк Все права защищены.
 ПОДДЕРЖИВАЕТСЯ СЕТЬ
ПОДДЕРЖИВАЕТСЯ СЕТЬ



 русский
русский






