Инерциальные навигационные системы (ИНС) играют решающую роль в технологиях автономного вождения, особенно в преодолении ограничений других датчиков, таких как GPS, камеры и LiDAR. Они обеспечивают непрерывную, высокочастотную и непрерывную информацию о состоянии движения и являются одним из основных компонентов восприятия и позиционирования в системах автономного вождения.
Основная функция инерциальной навигационной системы в автономном вождении — это восприятие состояния движения транспортного средства. Измерение трехмерного положения, скорости и углов ориентации (включая крен, тангаж, рыскание) транспортного средства. Инерциальный измерительный блок (ИМБ), как основной датчик ИНС, имеет очень высокую частоту обновления данных (обычно выше 100 Гц), значительно превосходящую GPS (1-10 Гц) и камеры/лидары (10-30 Гц), и может фиксировать мгновенные динамические изменения транспортного средства.
В системах навигации для автономного вождения сигналы GPS часто теряются или становятся ненадежными, что приводит к прерыванию или серьезному ухудшению сигнала GPS, например, в туннелях, подземных гаражах и под эстакадами, где спутниковые сигналы полностью блокируются; в городских каньонах и районах с высотными зданиями сигналы GPS сильно отражаются и подвержены многолучевым помехам, что приводит к значительному снижению или даже полному отказу в определении местоположения; в густых лесах листья также могут блокировать спутниковые сигналы.
На этом этапе системы инерциальной навигационной системы (ИНС) обычно играют важную роль. Используя метод инерциальной навигации (идентификации по пройденному расстоянию), на основе известных точных данных о положении и ориентации в предыдущий момент времени, измеренные инерциальным измерительным блоком (ИМБ) значения ускорения и угловой скорости интегрируются для расчета текущего относительного смещения и изменения ориентации транспортного средства, что позволяет определить новое положение и ориентацию. Это обеспечивает непрерывность позиционирования. Благодаря предоставлению высокочастотной информации об ориентации, даже при хорошем сигнале GPS, высокочастотная и высокоточная информация об ориентации (крен, тангаж, рыскание), предоставляемая ИНС, труднодоступна для других датчиков.
В приведенной ниже таблице сравниваются показатели эффективности навигации интегрированной навигационной системы I4500 в условиях спутниковой навигации и при потере спутникового сигнала.
Производительность системы I4500
Параметры | Индекс (среднеквадратичный) | Комментарии | |
Точность заголовка | Двойная GNSS | 0,1° | Базовая линия 2 м |
Одна GNSS | 0,2° | Необходимо маневрировать | |
Точность сохранения данных при сбоях GNSS | 0,2°/мин |
| |
Отношение Точность | GNSS действителен | 0,1° |
|
Точность сохранения данных при сбоях GNSS | 0,2°/мин |
| |
режим VG (Время отказа GNSS неограничено, ускорение не предусмотрено) | 2° |
| |
Точность горизонтального позиционирования | GNSS действителен | 1,2 м | Одноточечное соединение |
2 см + 1 ppm | РТК | ||
Сбой GNSS (60 с) | 20 м |
| |
В современных системах автоматического управления без исключения используется технология объединения данных с датчиков. Инерциальная навигационная система (ИНС) является ключевым узлом в этой системе.
⚪ Интеграция с GNSS позволяет создать интегрированную навигационную систему GNSS/INS, представляющую собой наиболее классическую и отработанную комбинацию. GNSS обеспечивает абсолютное положение и долговременную стабильность, но обновления происходят медленно и подвержены помехам; INS предоставляет высокочастотную, непрерывную информацию об относительном движении и ориентации, но имеет место кумулятивная ошибка (дрейф). Фильтр Калмана использует преимущества обеих систем для взаимной коррекции: GNSS корректирует дрейф INS, а INS обеспечивает непрерывное позиционирование и плавный выходной сигнал GNSS при сбоях GNSS. Во-вторых, это позволяет повысить общую точность и устойчивость, а точность и надежность комбинированной системы значительно выше, чем у отдельных GNSS или INS.
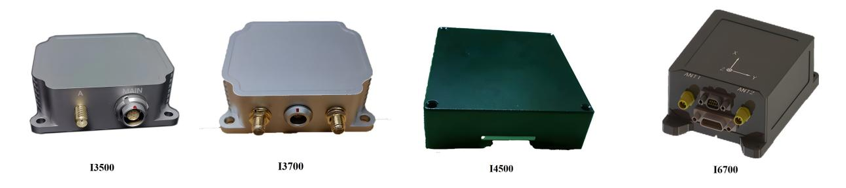
⚪ Благодаря интеграции со спидометром, спидометр предоставляет информацию о скорости вращения колес (скорость, пройденное расстояние), что может помочь в коррекции ошибок инерциальной навигационной системы (ИНС) при оценке скорости, особенно при движении автомобиля по прямой. В следующей таблице показаны показатели производительности интегрированной навигационной системы I3700 производства Micro-Magic Inc. Даже в случае потери спутникового сигнала высокая точность измерений может быть достигнута благодаря алгоритмическому объединению данных ИНС и спидометра.
Индексы точности навигации I3700
Потерянное время блокировки | Режим навигации | Точность позиционирования | Точность скорости | Точность тангажа/крена | Точность заголовка |
3s | Подключиться к одометру | 1 см | 0,03 м/с | 0,1° | 0,2° |
10-е | 1m | 0,1 м/с | 0,1° | 0,2° | |
60-е | 6m | 0,1 м/с | 0,2° | 0,35° |
⚪ Благодаря интеграции с визуальной/лидарной SLAM-системой, высокочастотные данные IMU могут обеспечивать прогнозирование движения для визуальной или лидарной обработки, снижая вычислительную сложность сопоставления изображений или облаков точек и повышая производительность и надежность в реальном времени (особенно в условиях быстрого движения или слабой текстуры). Точная информация об ориентации (крен, тангаж), предоставляемая INS, имеет решающее значение для правильного анализа геометрических взаимосвязей изображений с камеры или облаков точек LiDAR на склонах и неровных дорогах.
Примеры применения
В качестве примера рассмотрим продукт I6700, выпущенный компанией Micro-Magic Inc. Эта система может интегрировать различные вспомогательные датчики, такие как GNSS, одометр, магнитометр и т. д., и обеспечивать точную коррекцию курса для транспортных средств в различных режимах работы.
Метод корректировки курса I6700
Функция | Состояние | Комментарии |
GNSS Двойная антенна Направление | Включение двух антенн | Подходит для открытых полей |
Кинематическое выравнивание | Самолёт、Автомобильная и морская промышленность | Подходит для маневрирования в больших пространствах со скоростью несущего груза не менее 3 м/с. |
Направление GPSTrue | GPS включен | Подходит для открытых полей |
Выравнивание ускорения | Режим вертолета | Ускорение не менее 2,5 м/с² в течение 2 секунд |
Магнитный заголовок | Включить магнитный компас | Магнитное поле в окружающей среде относительно стабильно. |
Компания MicroMagic Inc. выпустила высокоточные инерциальные навигационные системы.
Инерциальная навигационная система (ИНС) является основой системы позиционирования для автономного вождения. Она обеспечивает непрерывную, высокочастотную и невозмущенную информацию о состоянии движения и ориентации транспортного средства, что является ключевой технологией для обеспечения непрерывности позиционирования, надежности и высокой частоты отклика. Особенно в сложных сценариях, когда GPS теряет связь (туннели, городские каньоны), ИНС поддерживает свою способность позиционирования за счет инерциальной навигации, что является неотъемлемой частью резервирования безопасности. Хотя ее собственная суммарная ошибка требует тесной интеграции с другими датчиками (GNSS, датчики скорости вращения колес, системы машинного зрения, LiDAR) для коррекции, в рамках многосенсорной интеграции ИНС выступает в качестве центрального узла, значительно повышая точность, надежность и динамические характеристики всей системы позиционирования. С развитием технологии инерциальных измерительных блоков (например, повышением точности MEMS-гироскопов и миниатюризацией твердотельных лазерных гироскопов) и оптимизацией алгоритмов интеграции роль ИНС в автономном вождении будет становиться все более важной.

Xml политика конфиденциальности блог Карта сайта
Авторские права @ Микро-Магия Инк Все права защищены.
 ПОДДЕРЖИВАЕТСЯ СЕТЬ
ПОДДЕРЖИВАЕТСЯ СЕТЬ



 русский
русский