Высокоточный тактический MEMS IMU-датчик U4200 для навигации роботов-беспилотников
Серия U4200 представляет собой датчик IMU/VRU/AHRS, состоящий из тактического MEMS-IMU и магнитометра. Он оснащен разработанной нами адаптивной расширенной фильтрацией Калмана, алгоритмом динамического анализа шума IMU и алгоритмом анализа состояния движения несущей, что позволяет обеспечить точность определения углов ориентации в условиях высокой динамики и уменьшить дрейф углов курса.
Каждый датчик перед отправкой с завода проходит точную компенсацию, включая температурную, нулевую, масштабную и поперечную ось.
Датчики серии U4200 осуществляют передачу данных через различные интерфейсы, такие как RS232, RS422 и CAN, и обладают широкими возможностями пользовательской настройки.
Серия U4200 может синхронизироваться с системой посредством внешнего запуска, а также обеспечивать синхронизацию по времени с внешними системами, такими как радары и камеры, благодаря функции синхронного вывода.
Многофункциональный верхний компьютер (графический интерфейс пользователя) позволяет быстро оценить продукт, и его функции включают, помимо прочего, настройку модулей, отображение данных, обновление прошивки, запись данных и т. д.
Номер детали, :
U4200Минимальный объем заказа (MOQ) :
1Серия продукции и параметры
| Точность определения положения | Состояние | U4200-A | U4200-B | Единица |
| Тангаж (±90°) / Крен (±180°) (статический) | 0,05 (номинальный), 0,07 (макс.) | ° | ||
| Тангаж (±90°) / Крен (±180°) (динамический) | 0,05 (номинальный) 0,07 (макс.) | |||
| Смещение по оси рыскания (±180°) составляет 2 часа (6 степеней свободы) ① | 0.1 | |||
| Магнитная поддержка (AHRS) ② | 2 (номинальный), 3 (макс.) | |||
| Ошибка вращения по оси рыскания (6 степеней свободы) (вращение менее 100°/с) ③ | <0,5 (номинальный), 1 (макс.) | |||
| Примечание: ① Модуль неподвижно в горизонтальном положении в течение 2 часов. ② После геомагнитной калибровки устройство необходимо настроить в режиме AHRS при отсутствии помех от магнитного поля в окружающей среде. ③ Поворотный стол непрерывно вращается в течение 10 оборотов, и угол курса накапливает погрешность. |
||||
| Гироскоп | Состояние | U4200-A | U4200-B | Единица |
| Диапазон измерений | ±300 | °/с | ||
| Разрешение | 16 | кусочек | ||
| Линейная ошибка① | 300°/с -40℃-110℃ | ±0,15 (номинальный), ±0,3 (макс.) | °/с | |
| 100°/с -40℃-110℃ | ±0,01 (номинальный), ±0,04 (макс.) | |||
| Погрешность по поперечной оси | ±0,15 | % | ||
| Полоса пропускания 3 дБ | 235 (номинальный), 250 (макс.) | Hz | ||
| Частота дискретизации | 1000 | Hz | ||
| Плотность шума | XY: 0,0004 Z: 0,0006 |
°/с/√Гц | ||
| Нестабильность нулевого смещения② | Аллан, 1σ | 0.3 | °/ч | |
| Стабильность при нулевом смещении | 10 с, 1σ | 0,5 | °/ч | |
| Повторяемость при нулевом смещении | 1σ | 0,8 | °/ч | |
| Случайное блуждание под углом③ | Аллан 1σ | XY: 0,015 Z: 0,025 |
°/√ч | |
| Полное температурное нулевое смещение | -40-85℃ | XY: 0,25 Z: 0,03 |
°/с | |
| Чувствительность акселерометра (по всем 3 осям) | Для ввода данных при постоянной гравитации | 0,00075 | °/с/г | |
| Примечания: ①: Линейная ошибка — это максимальное отклонение в заданном диапазоне от линии наилучшего соответствия, определяемой измеренными значениями. Линейная модель наилучшего соответствия использует метод наименьших квадратов для линейной аппроксимации. ②: Значение, полученное путем деления минимального значения дисперсии Аллана на 0,664. Во время измерения используется фильтр нижних частот 13 Гц и частота дискретизации 200 Гц. Перед началом сбора данных необходимо выждать 15 минут для стабилизации, чтобы обеспечить полную термическую стабильность. ③: Угловое случайное блуждание представляет собой член белого шума, оцениваемый по отклонению Аллана при постоянной времени τ = 1 секунда. |
||||
| Акселерометр | Состояние | U4200-A | U4200-B | Единица |
| Диапазон измерений | 16 | g | ||
| Разрешение | 16 | кусочек | ||
| Нулевое смещение | 2 | mg | ||
| Линейная ошибка① | 300°/с -40℃-110℃ | ±3 (номинальный), ±15 (макс.) | mg | |
| 100°/с -40℃-110℃ | ±0,5 (номинальный), ±1 (макс.) | |||
| Погрешность по поперечной оси | ±0,15 | % | ||
| Полоса пропускания 3 дБ | 210 (номинальный), 235 (макс.) | Hz | ||
| Частота дискретизации | 1000 | Hz | ||
| Плотность шума | 0,0008 | м/с²√Гц | ||
| Нестабильность нулевого смещения② | Аллан, 1σ | 10 | ug | |
| Стабильность при нулевом смещении | 10 с, 1σ | 30 | ug | |
| Повторяемость при нулевом смещении | 1σ | 40 | ug | |
| Случайное блуждание под углом③ | Аллан 1σ | 0,03 | м/с/√ч | |
| Полное температурное нулевое смещение | -40-85℃ | 0,5 (номинальный), 2 (макс.) | mg | |
| Примечания: ①: Линейная ошибка — это максимальное отклонение в заданном диапазоне от линии наилучшего соответствия, определяемой измеренными значениями. Линейная модель наилучшего соответствия использует метод наименьших квадратов для линейной аппроксимации. ②: Значение, полученное путем деления минимального значения дисперсии Аллана на 0,664. Во время измерения используется фильтр нижних частот 13 Гц и частота дискретизации 200 Гц. Перед началом сбора данных необходимо выждать 15 минут для стабилизации, чтобы обеспечить полную термическую стабильность. ③: Угловое случайное блуждание представляет собой член белого шума, оцениваемый по отклонению Аллана при постоянной времени τ = 1 секунда. |
||||
| Магнитометр | Состояние | U4200-A | U4200-B | Единица |
| Диапазон | ±20 | Гаусс | ||
| Частота дискретизации | 200 | HZ | ||
| Линейность (наилучшая аппроксимирующая прямая Fs=2G) | 0.1 | Фс% | ||
| Датчик температуры | Состояние | U4200-A | U4200-B | Единица |
| Диапазон | -40 ~ +85 | ℃ | ||
| Ошибка смещения | ±1 | K | ||
| Механика/Окружающая среда | U4200-A / U4200-B | Единица | ||
| Источник питания | 4.8 ~ 36 | V | ||
| Потребление электроэнергии | 400 | mW | ||
| Рабочая температура | -125 | ℃ | ||
| Время начала① | 2 | s | ||
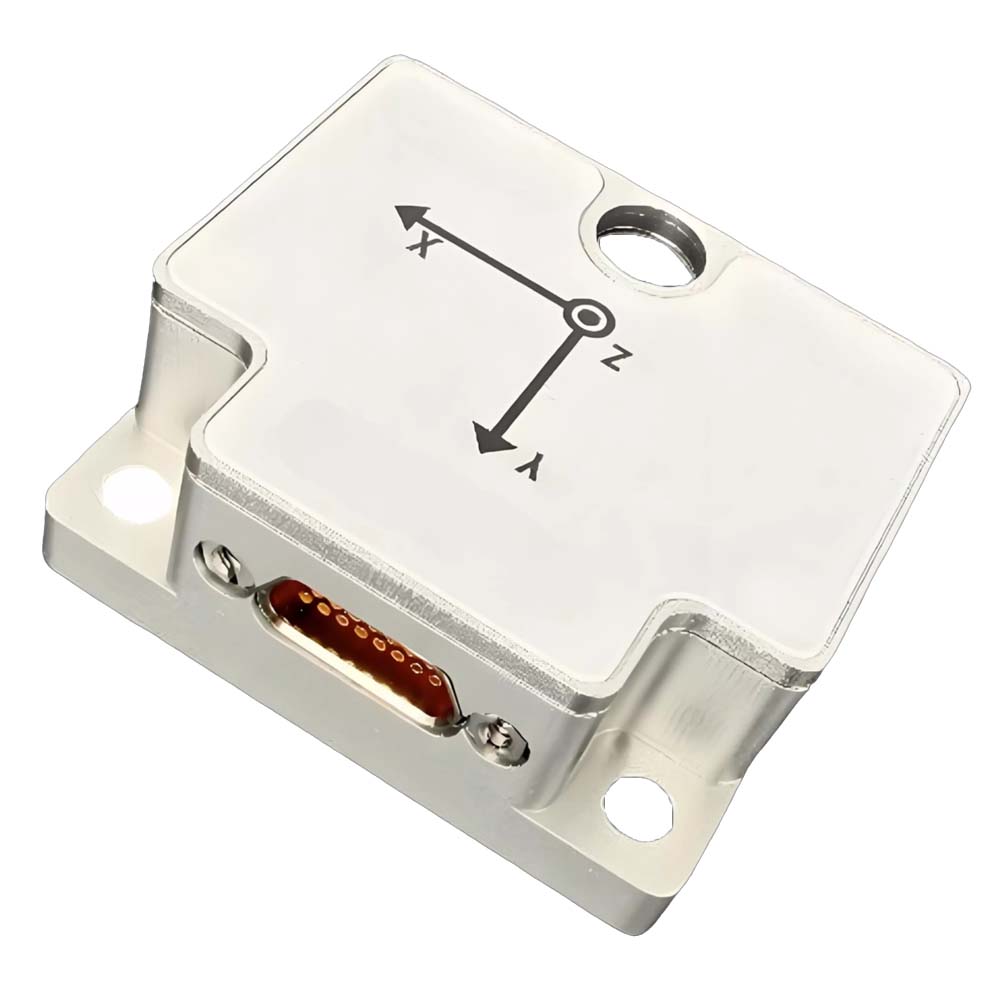
| Размер | 44.8*38.6*18.5 | mm | ||
| Масса | 55 | g | ||
| Материал и технология оболочки | Алюминиевый сплав, ЧПУ | |||
| Монтажные винты | M3 | |||
| Антивибрационная система | 1,0 мм (10 Гц-58 Гц) и ≤20 г (58 Гц-600 Гц) | |||
| Шок (длительность) <1 мс) | 2000 | g | ||
| IP-класс | Защита от воды IP68 | |||
| тест на падение | Трижды свободное падение с экспериментальной платформы высотой 75 см. | |||
| Температурный шок | Повысить температуру с -40 до 85 ℃ в течение 1 часа, 5 раз. | |||
| Примечания: ① Время запуска — это время, необходимое для завершения работы системы и вывода корректных данных. В течение этого периода модуль должен оставаться неподвижным. |
||||
| Интерфейс | Параметры | Состояние | Мин | Нормальный | Макс | Единица |
| RS232 | Скорость передачи данных① | 9600 | 115200 | 921600 | бит/с | |
| Начальные элементы | 1 | кусочек | ||||
| Длина данных | 8 | биты | ||||
| Стоп-бит | 1 | кусочек | ||||
| Контрольная сумма | Никто | кусочек | ||||
| Выходная частота кадров② | 0 | 100 | 1000 | Hz | ||
| Входное сопротивление | RS-232 | 3 | 5 | 7 | kΩ | |
| Выходное сопротивление | 300 | 10М | Ω | |||
| МОЖЕТ | Скорость передачи данных③ | 125 | 500 | 1000 | кбит/с | |
| Выходная частота кадров④ | 5 | 100 | 200 | Hz | ||
| Входное сопротивление⑤ | с резистором 120 Ом | 120 | Ω | |||
| без резистора 120 Ом | 19 | 30 | 52 | kΩ | ||
| RS422 | Скорость передачи данных | 9600 | 115200 | 921600 | бит/с | |
| Начальные элементы | 1 | кусочек | ||||
| Длина данных | 8 | биты | ||||
| Стоп-бит | 1 | кусочек | ||||
| Контрольная сумма | Никто | кусочек | ||||
| Выходная частота кадров | 0 | 100 | Hz | |||
| Входное сопротивление⑤ | с резистором 120 Ом | 120 | Ω | |||
| без резистора 120 Ом | 48 | kΩ | ||||
| Спусковой штифт | Логическое напряжение⑥ | Высокий | 2 | V | ||
| Низкий | 0,6 | V | ||||
| Задерживать | От запуска до передачи данных | 800 | us | |||
| Примечания: ① Если потребуется внести изменения, обратитесь к инструкции и руководству по программированию. ② Датчик поддерживает вывод данных с частотой 1, 5, 10, 50, 200, 250, 500 и 1000 Гц. ③ Если потребуется внести изменения, обратитесь к инструкции и руководству по программированию. ④ Датчик поддерживает вывод данных с частотой 5, 10, 50, 100 и 200 Гц. ⑤ По умолчанию резистор 120 Ом не подключен. ⑥ Для настройки времени запуска и параметров работы обратитесь к главе о функциях синхронизации, а также к руководству по эксплуатации и программированию. |
||||||
Производственный процесс
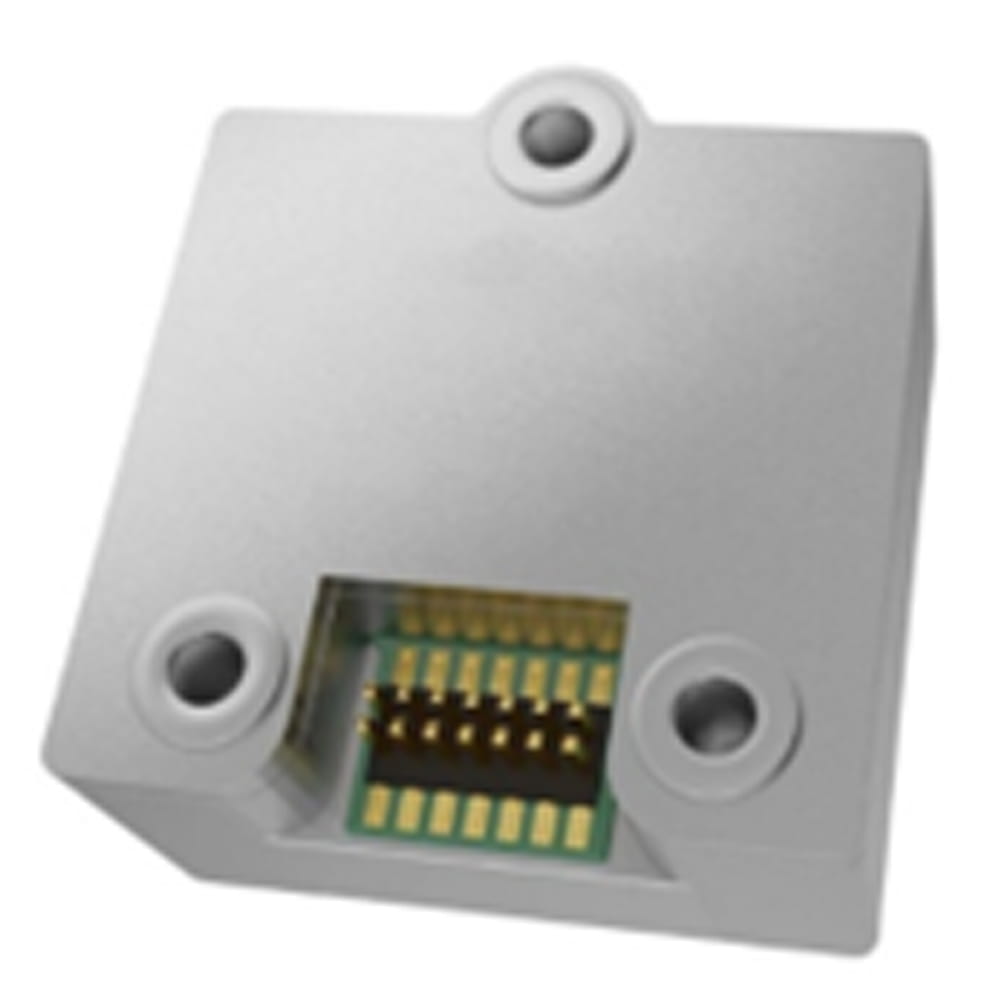
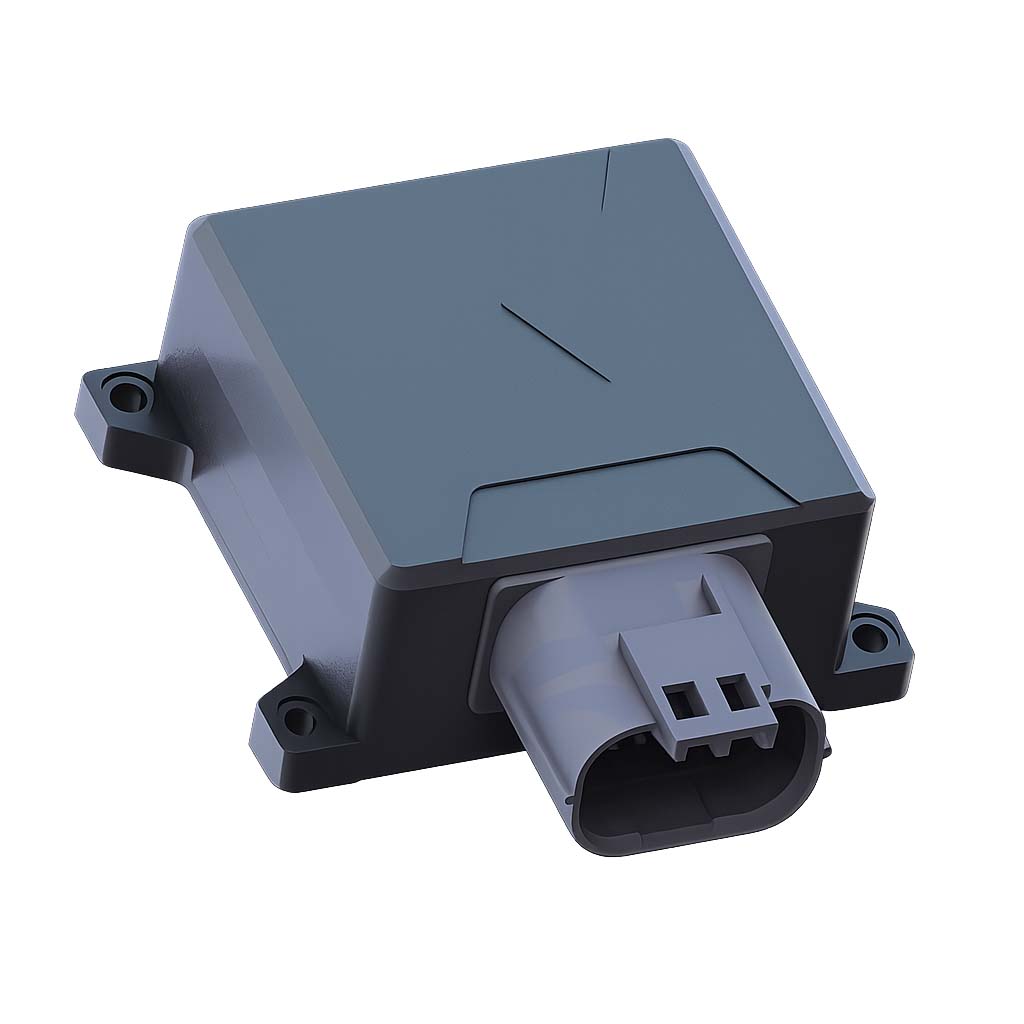
Размеры изделия

Сценарии применения



Часто задаваемые вопросы
В1. Для чего используется U4200?
U4200 — это высокоточный MEMS IMU / VRU / AHRS-датчик, предназначенный для определения ориентации, управления траекторией, стабилизации платформы, подземных приборов, низкоскоростных беспилотных роботов, прецизионных приборов и строительной техники.
В2. Какие интерфейсы поддерживает U4200?
U4200 поддерживает коммуникационные интерфейсы RS232, RS422 и CAN, предоставляя широкие возможности пользовательской настройки для интеграции с различными системами.
В3. Какие протоколы связи доступны?
Датчик поддерживает множество протоколов, включая бинарный протокол, CANopen, Modbus, а интерфейс CAN также поддерживает J1939.













Xml политика конфиденциальности блог Карта сайта
Авторские права @ Микро-Магия Инк Все права защищены.
 ПОДДЕРЖИВАЕТСЯ СЕТЬ
ПОДДЕРЖИВАЕТСЯ СЕТЬ



 русский
русский