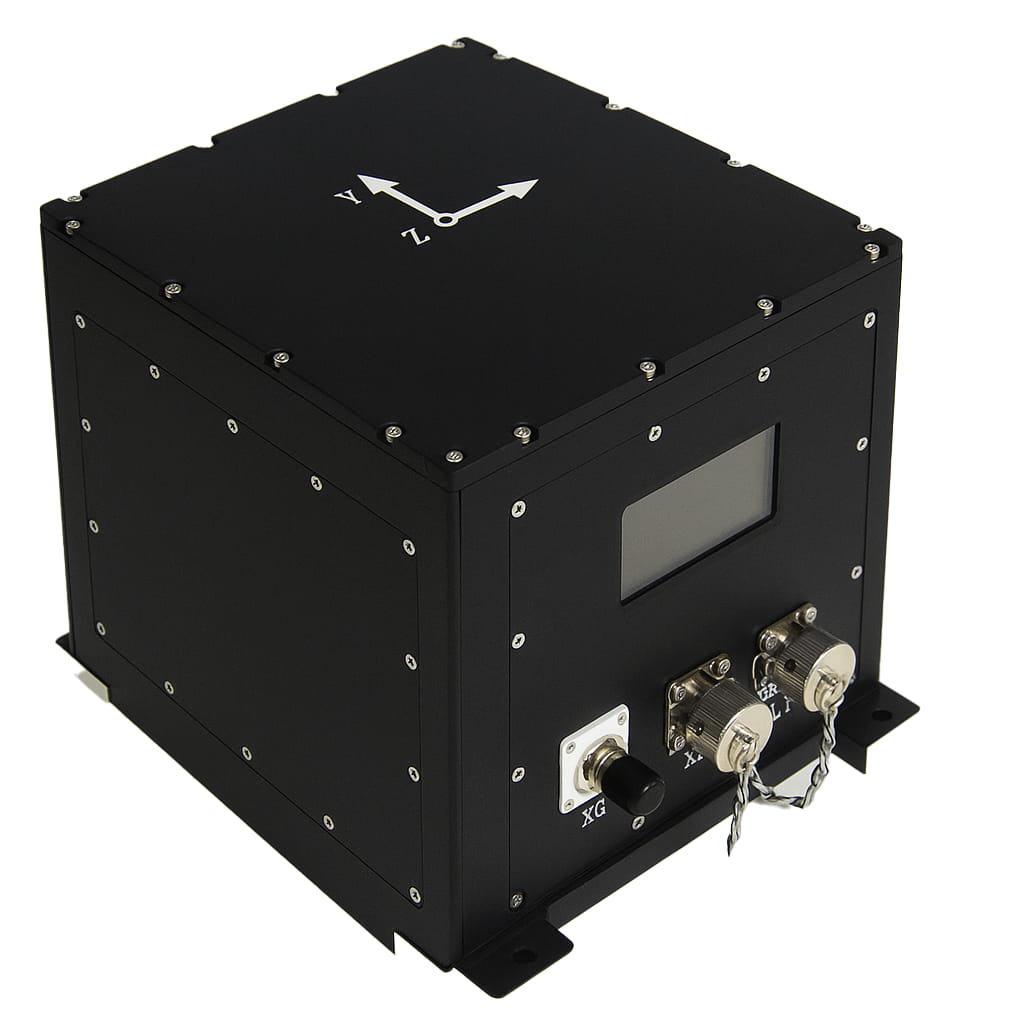
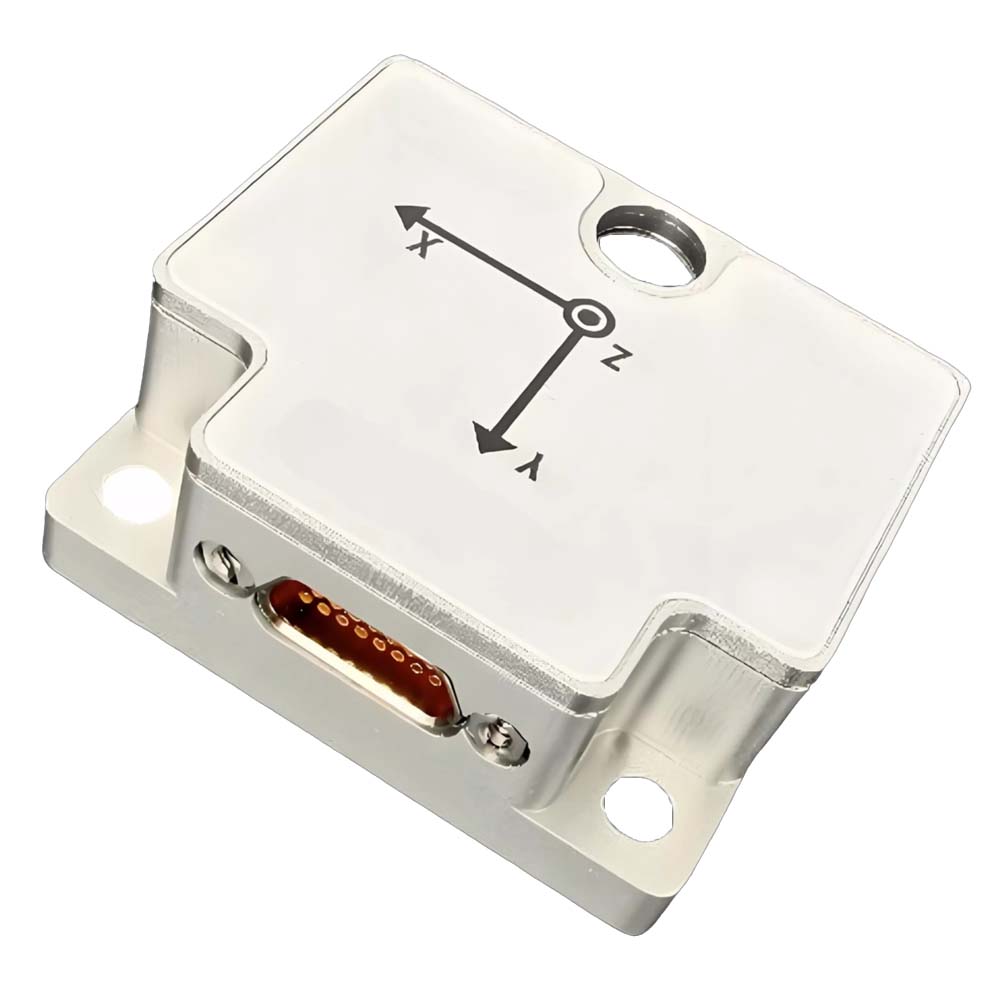
Тактический MEMS IMU-датчик U4500 AHRS INS для навигации БПЛА и морских роботов

Датчики серии U4500 состоят из высокопроизводительных тактических MEMS-IMU, разработанных для систем IMU/VRU/MRU/AHRS/INS, и оснащены разработанными ими адаптивным расширенным фильтром Калмана, алгоритмами динамического анализа шума IMU, алгоритмами оценки вертикального перемещения, алгоритмами анализа состояния движения несущей и алгоритмами слияния данных GNSS, что позволяет предоставлять пользователям точную информацию о местоположении, ориентации, скорости и других параметрах.
Датчики серии U4500 передают данные через интерфейсы UART/CAN и имеют широкие возможности пользовательской настройки. (Для работы с CAN-шиной необходимо подключить внешний приемопередатчик).
Серия U4500 может синхронизироваться с системой посредством внешнего запуска, принимать время UTC, а также синхронизировать время с внешними системами, такими как радары и камеры, с помощью функции синхронного вывода.
Многофункциональный бортовой компьютер (графический интерфейс пользователя) может помочь быстро оценить продукт, и эти функции включают, помимо прочего, настройку модулей, отображение данных, обновление прошивки, запись данных и т. д.
Номер детали, :
U4500Минимальный объем заказа (MOQ) :
1Серия продукции и параметры
| Параметры слияния | Состояние | U4500-A | U4500-B | U4500-C | U4500-D | Единица |
| Наклон/Крен)① | 0,05 (номинальный), 0,1 (макс.) | ° | ||||
| Разрешение | 0,01 | ° | ||||
| Заголовок (VRU/MRU) )① | 0,2 (номинальный), 0,3 (макс.) | ° | ||||
| Заголовок (AHRS) ② | 0,5 (номинальный), 2 (макс.) | |||||
| Разрешение | 0,01 | |||||
| Время начала | ИДУ/ВРУ | 2 | s | |||
| МРУ (статический) | 60 | |||||
| МРУ (море) | 180 | |||||
| Поднять | / | 5/5% (номин.) | cm | |||
| Период тяги | 1~10(ном) | s | ||||
| Примечания: ①: Тест на вращение поворотного стола. ②: Измерения проводятся при условии отсутствия помех от магнитного поля после геомагнитной калибровки, при этом устройство необходимо настроить в режим AHRS. |
||||||
| Гироскоп | Состояние | U4500-A | U4500-B | U4500-C | U4500-D | Единица |
| Диапазон измерений | ±300 | °/с | ||||
| Разрешение | 16 | кусочек | ||||
| Линейная ошибка① | 300°/с -40℃-110℃ 100°/с -40℃-110℃ |
±0,15 (номинальный), ±0,3 (макс.) | °/с | |||
| Погрешность по поперечной оси | ±0,15 (макс.) | % | ||||
| Полоса пропускания 3 дБ | 235 (номинальный), 250 (макс.) | Hz | ||||
| Частота дискретизации | 1000 | Hz | ||||
| Плотность шума | XY: 0,0004 Z: 0,0006 |
(°/с)/√Гц | ||||
| Нестабильность нулевого смещения② | Дисперсия Аллана | 0.3 | °/ч, 1σ | |||
| Стабильность при нулевом смещении | 10 секунд плавно | 0,5 | °/ч, 1σ | |||
| Повторяемость при нулевом смещении | 0,8 | °/ч, 1σ | ||||
| Случайное блуждание под углом③ | Дисперсия Аллана | XY: 0,015 Z: 0,025 |
°/√Гц, 1σ | |||
| Полное температурное нулевое смещение | -40-85℃ | XY: 0,25 (макс.) Z: 0,01 (номинальный), 0,03 (макс.) |
°/с | |||
| чувствительность акселерометра | Для ввода данных при постоянной гравитации | 0,00075 | °/с/г | |||
| Примечания: ①: Линейная погрешность — это максимальное отклонение в заданном диапазоне от линии наилучшего соответствия, определяемой измеренными значениями. ②: Значение, полученное путем деления минимального значения дисперсии Аллана на 0,664. Во время измерения используется фильтр нижних частот 13 Гц и частота дискретизации 200 Гц. Перед началом сбора данных необходимо выждать 15 минут для стабилизации, чтобы обеспечить полную термическую стабильность. ③: Угловое случайное блуждание представляет собой член белого шума, оцениваемый по отклонению Аллана при постоянной времени τ = 1 секунда. |
||||||
| Акселерометр | Состояние | U4500-A | U4500-B | U4500-C | U4500-D | Единица |
| Диапазон измерений | ±16 | g | ||||
| Разрешение | 16 | кусочек | ||||
| Начальное нулевое смещение | 2 | mg | ||||
| Линейная ошибка① | 8 г -40℃-110℃ | ±3 (номинальный), ±15 (макс.) | mg | |||
| 1 г -40℃-110℃ | ||||||
| Погрешность по поперечной оси | ±0,15 (макс.) | % | ||||
| Полоса пропускания 3 дБ | 210 (номинальный), 235 (макс.) | Hz | ||||
| Частота дискретизации | 1000 | Hz | ||||
| Плотность шума | 0,0008 | м/с²/√Гц, 1σ | ||||
| Нестабильность нулевого смещения② | Дисперсия Аллана | 0,01 | mg | |||
| Стабильность при нулевом смещении | 10 секунд плавно | 0,03 | mg | |||
| Повторяемость при нулевом смещении | 0,04 | mg | ||||
| Случайное блуждание под углом③ | Дисперсия Аллана | 0,03 | м/с√ч, 1σ | |||
| Полное температурное нулевое смещение | -40-85℃ | 0,5 (номинальный), 2 (макс.) | mg | |||
| Примечания: ①: Линейная погрешность — это максимальное отклонение в заданном диапазоне от линии наилучшего соответствия, определяемой измеренными значениями. ②: Значение, полученное путем деления минимального значения дисперсии Аллана на 0,664. Во время измерения используется фильтр нижних частот 13 Гц и частота дискретизации 200 Гц. Перед началом сбора данных необходимо выждать 15 минут для стабилизации, чтобы обеспечить полную термическую стабильность. ③: Угловое случайное блуждание представляет собой член белого шума, оцениваемый по отклонению Аллана при постоянной времени τ = 1 секунда. |
||||||
| Магнитометр | Состояние | U4500-A | U4500-B | U4500-C | U4500-D | Единица |
| Диапазон | / | ±20 | Гаусс | |||
| Шум | / | 450 | nT | |||
| Линейность | / | 20 | uT | |||
| Датчик температуры | Состояние | U4500-A | U4500-B | U4500-C | U4500-D | Единица |
| Диапазон | -40 – 135 | ℃ | ||||
| Ошибка смещения | ±1 | ℃ | ||||
| Барометр | Состояние | U4500-A | U4500-B | U4500-C | U4500-D | Единица |
| Диапазон | / | 300 ~ 1200 | гПа | |||
| Разрешение | / | 0,006 | гПа | |||
| Точность | / | ±0,06 | гПа | |||
| Механика/Окружающая среда | Состояние | U4500-A | U4500-B | U4500-C | U4500-D | Единица |
| Источник питания VDD | 3.6 - 5.5 | V | ||||
| Потребление электроэнергии | 370 (макс.) | mW | ||||
| ТОМ | 0,4 (макс.) | V | ||||
| ВОХ | 2,6 (мин) | V | ||||
| ВИЛ | -0,3 (мин), 1 (макс) | V | ||||
| ВИХ | 1,9 (мин), 3,6 (макс) | V | ||||
| Рабочая температура | -125 | ℃ | ||||
| Температура хранения | -165 | ℃ | ||||
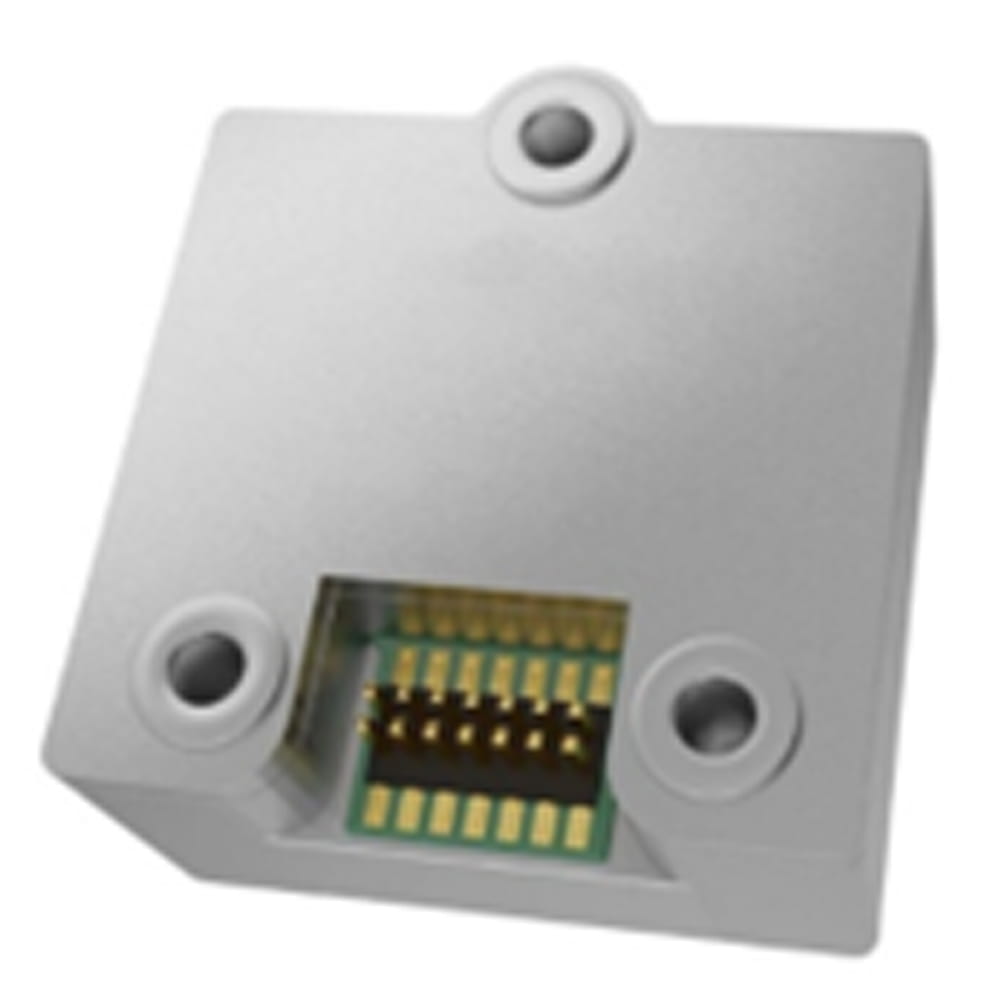
| Измерение | 24х24х14 | mm | ||||
| Материал и технология оболочки | Алюминиевый сплав, ЧПУ | |||||
| защита окружающей среды | Директива RoHS 2011/65/EU | |||||
| ЭМС | Директива LVD 2014/35/ЕС | |||||
| тест на падение | Трижды свободное падение с экспериментальной платформы высотой 75 см. | |||||
| Температурный шок | Повысить температуру с -40 до 85 ℃ в течение 1 часа, 5 раз. | |||||
| MTBF | 30000 | h | ||||
| Механический удар | 10000 | g | ||||
| ESD HBM | 2 кВ | JEDEC/ESDA JS-001 | ||||
| Интерфейс | Состояние | Мин | Нормальный | Макс | Единица | |
| UART1/UART2 UART3 МОЖЕТ |
Скорость передачи данных | 9600 | 115200 | 921600 | бит/с | |
| Начальная позиция | 0 | 100 | 1000 | Hz | ||
| 115200 | бит/с | |||||
| Скорость передачи данных | 125 | 500 | 1000 | кбит/с | ||
| Выходная частота кадров | 0 | 100 | 200 | Hz |
Производственный процесс
Размеры изделия

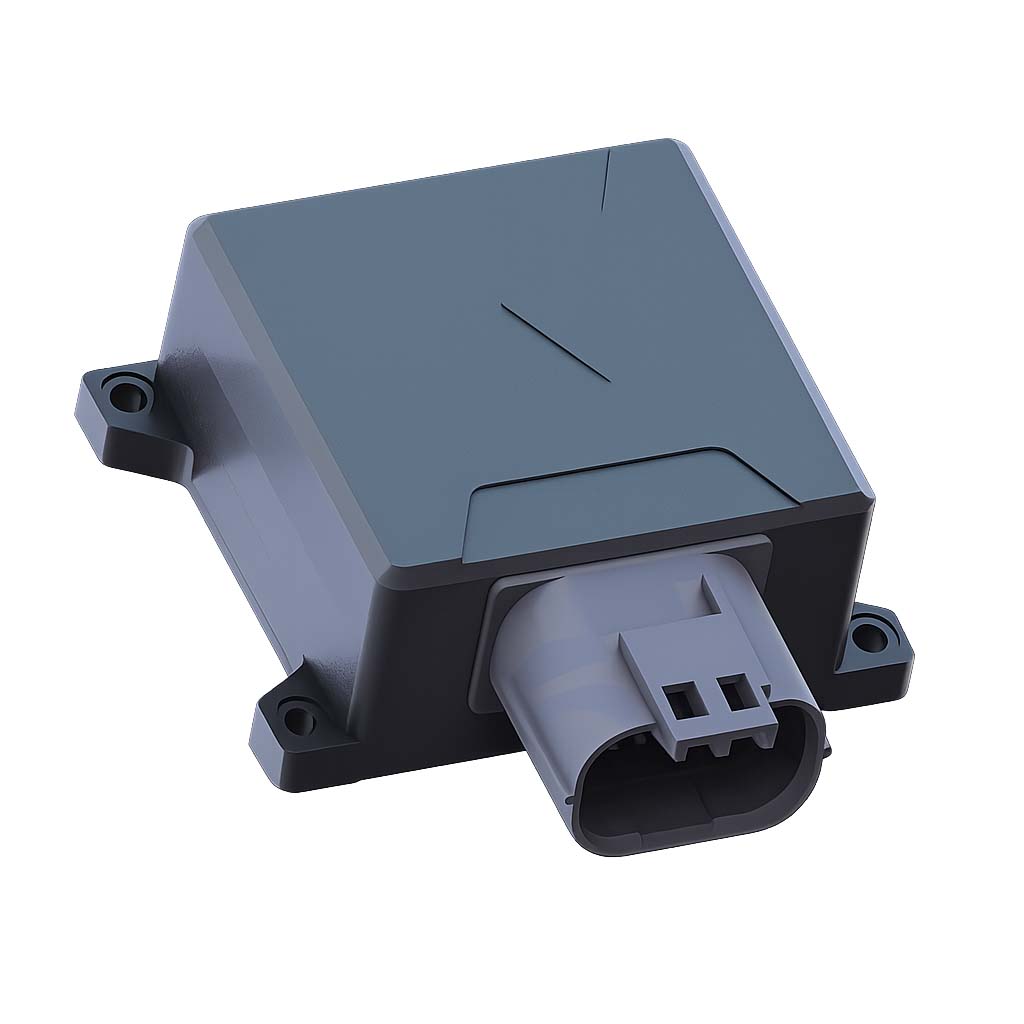
Сценарии применения



Часто задаваемые вопросы
1. Для чего используется U4500?
U4500 — это тактический MEMS IMU / VRU / MRU / AHRS / INS-датчик, предназначенный для определения ориентации БПЛА, низкоскоростных беспилотных роботов, подземных приборов, активной компенсации волн, управления ориентацией судов, динамического позиционирования, стабилизации платформ и строительной техники.
2. Какие интерфейсы поддерживает U4500?
U4500 поддерживает интерфейсы UART и CAN. Для работы с шиной CAN требуется внешний CAN-трансивер.
3. Какие функции может выполнять U4500?
U4500 объединяет множество функций, включая IMU, VRU, MRU, AHRS и INS. Он может выдавать данные об ускорении, угловой скорости, геомагнитном поле, атмосферном давлении, углах Эйлера, кватернионах, вертикальном перемещении, а при подключении к внешней GNSS — информацию о положении, скорости, ориентации и времени.












Xml политика конфиденциальности блог Карта сайта
Авторские права @ Микро-Магия Инк Все права защищены.
 ПОДДЕРЖИВАЕТСЯ СЕТЬ
ПОДДЕРЖИВАЕТСЯ СЕТЬ



 русский
русский