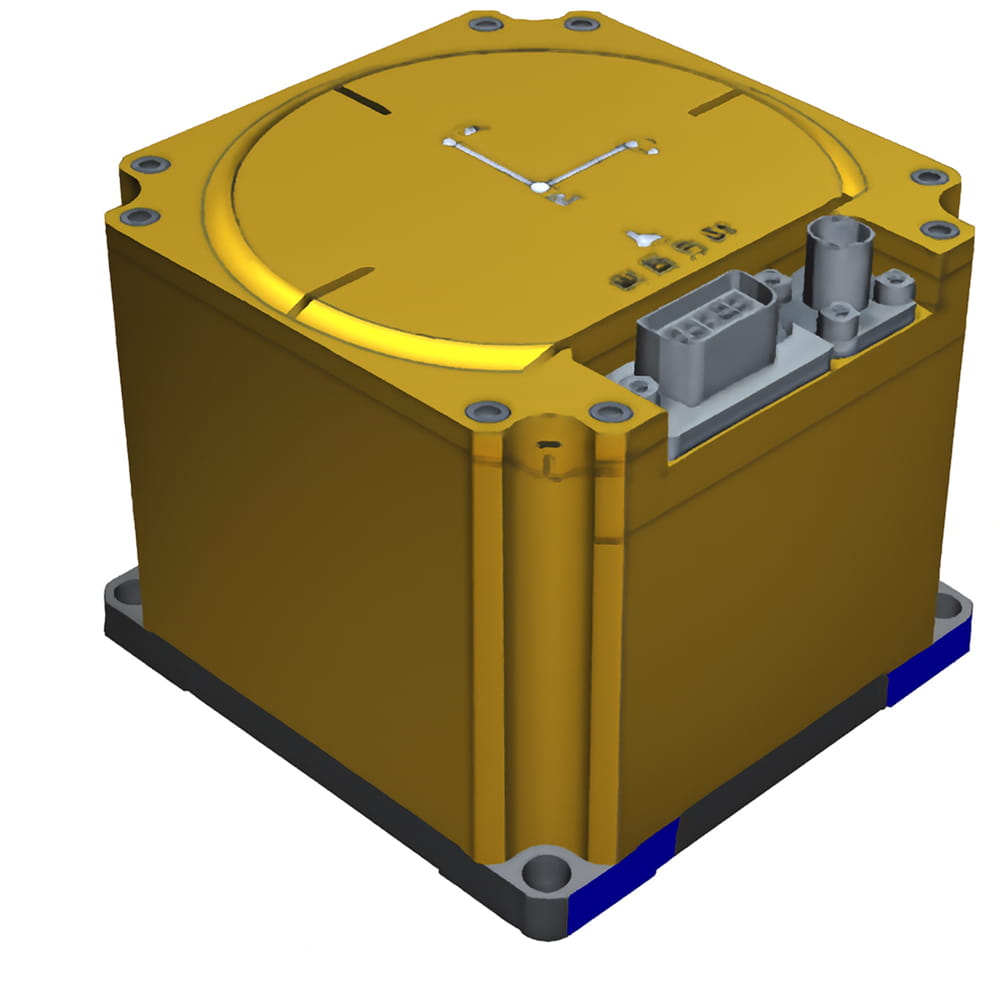
Высокоточная волоконно-оптическая инерциальная навигационная система с двумя антеннами GNSS+INS RTK для БПЛА, кораблей и транспортных средств.


Данное устройство оснащено встроенным трехкоординатным высокоточным волоконно-оптическим гироскопом, трехкоординатным высокоточным кварцевым гибким акселерометром и мобильным многорежимным многочастотным GNSS-приемником геодезического уровня, поддерживающим автономную функцию Beidou. Благодаря усовершенствованному интеллектуальному комбинированному алгоритму навигации и фильтру Калмана, оно оптимизировано для защиты от зон затенения GNSS и многолучевых помех, что позволяет осуществлять высокоточное измерение курса, ориентации, скорости и положения движущихся объектов.
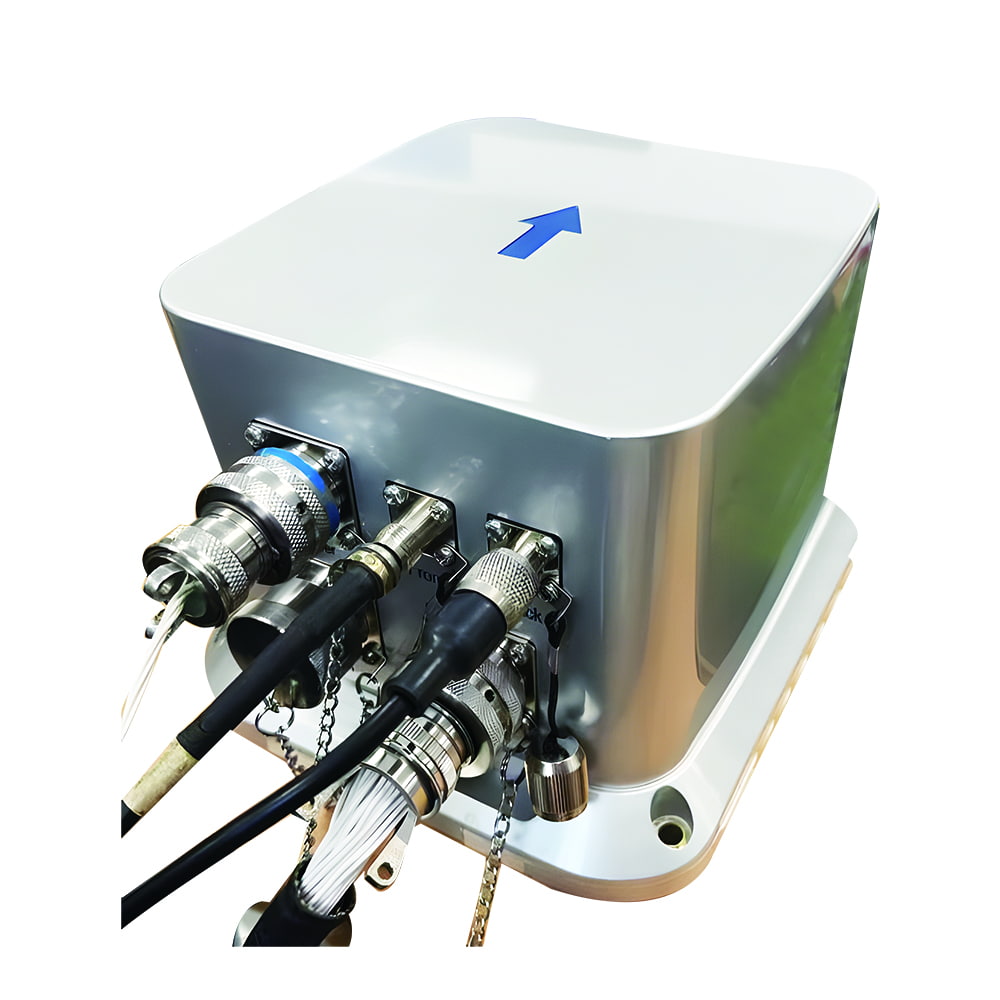
Эта инерциальная навигационная система также имеет множество интерфейсов для датчиков, таких как GNSS/одометр/DVL/барометрический высотомер, что позволяет ей успешно удовлетворять требованиям к долговременной, высокоточной и надежной навигации в сложных условиях, таких как городские каньоны, и может использоваться для навигации и управления различными беспилотными системами.
Характеристики продукта включают: быстрое и точное определение начального курса и ориентации, поддержку вывода курса и ориентации в реальном времени, встроенный двухрежимный приемник GPS и Beidou, поддержку динамической быстрой юстировки, интегрированную конструкцию INS/GNSS, поддержку постобработки IE, улучшенный алгоритм фильтра Калмана, а также устойчивость к электромагнитным помехам и вибрации. Может использоваться в системах навигации транспортных средств, летательных аппаратов, судов, системах управления устойчивостью и других областях.
Номер детали, :
IF3600Минимальный объем заказа (MOQ) :
1Серия продукции и параметры
| Интегрированная точность навигации INS/GNSS | ||||
| Точность отношения | Направление: ≤0,02° (1σ) | |||
| Тангаж/Крен: ≤0,005° (1σ) | ||||
| Точность позиционирования | Позиционирование по одной точке: ≤2 м (50% от центра потенциальной эффективности) | |||
| RTK: ≤2 см + 1 ppm (50% CEP) | ||||
| Точность скорости | ≤0,02 м/с (1σ) | |||
| Время выравнивания | Начинается после определения широты, долготы и высоты. Время выравнивания: ≤5 мин. | |||
| Интегрированная точность INS/одометра/DVL | 0,25% × пробег (зависит от точности одометра или DVL) | |||
| Точность чисто инерциальной навигации | ||||
| Точность отношения | Выравнивание по азимуту: ≤0,1°сек(Φ) (1σ, Φ: местная широта) | |||
| Горизонтальное выравнивание: ≤0,008° (1σ) | ||||
| Поддержание азимута: 0,03°/ч (1σ) | ||||
| Горизонтальное поддержание: 0,02°/ч (1σ) | ||||
| Точность позиционирования | ≤1 морская миля/час (50% от КЭП) | |||
| Ключевые характеристики компонентов | ||||
| Гироскоп | Диапазон | ±500°/с | Стабильность смещения | 0,03°/ч (1σ) |
| Акселерометр | Диапазон | ±20 г | Стабильность смещения | ≤20 мкг (1σ) |
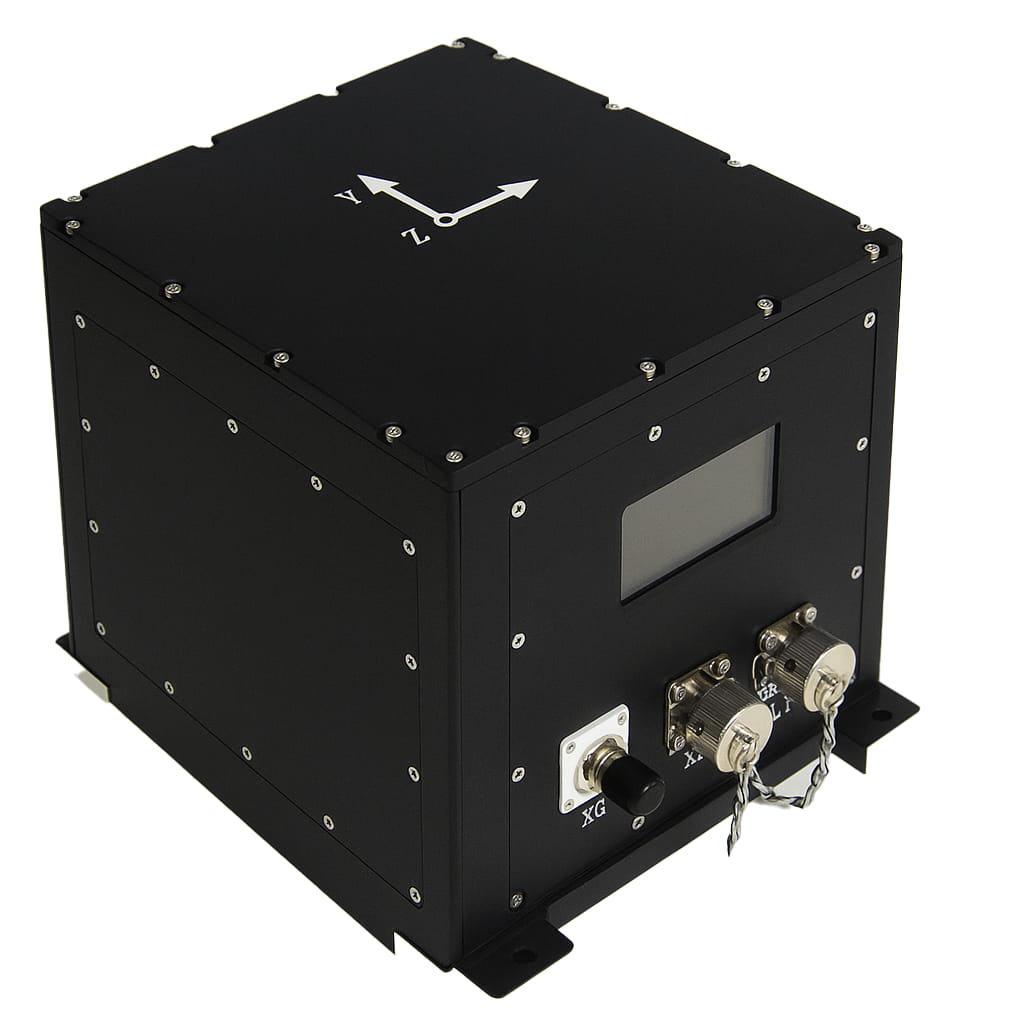
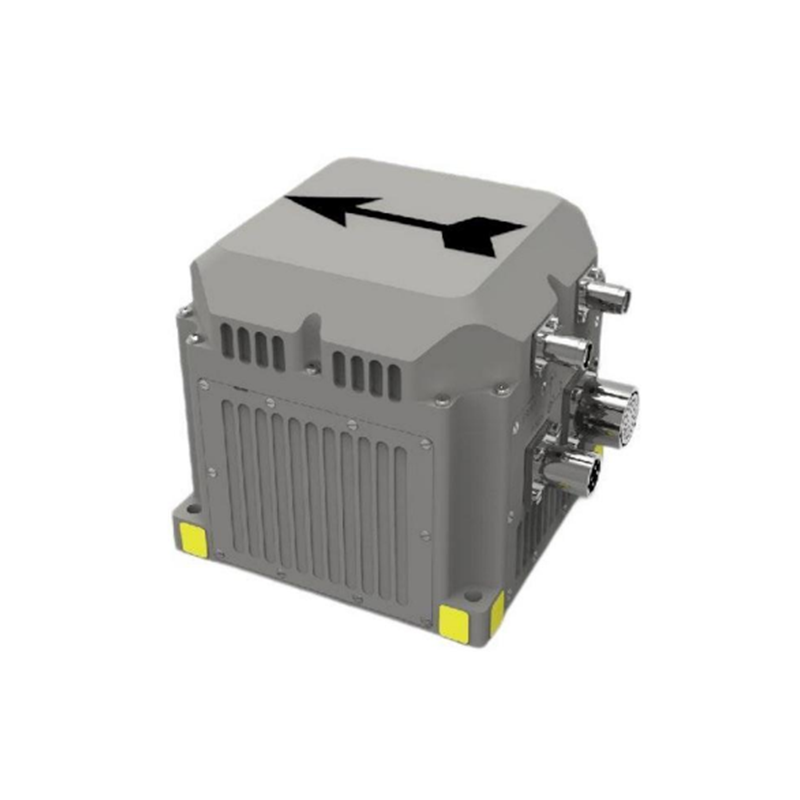
| Физические характеристики | Характеристики интерфейса | |||
| Напряжение питания | Номинальное напряжение: 24 В постоянного тока (12–32 В постоянного тока) | Тип интерфейса | 4 последовательных порта (RS232/RS422) | |
| Потребление электроэнергии | <20 Вт | Поддерживаемые сигналы: PPS, вход/выход EVENTMARK. | ||
| Рабочая температура | от -40℃ до +60℃ | Скорость передачи | 9600–921600 бит/с (настраиваемо) | |
| Степень защиты | IP65 | Пользовательские режимы | ||
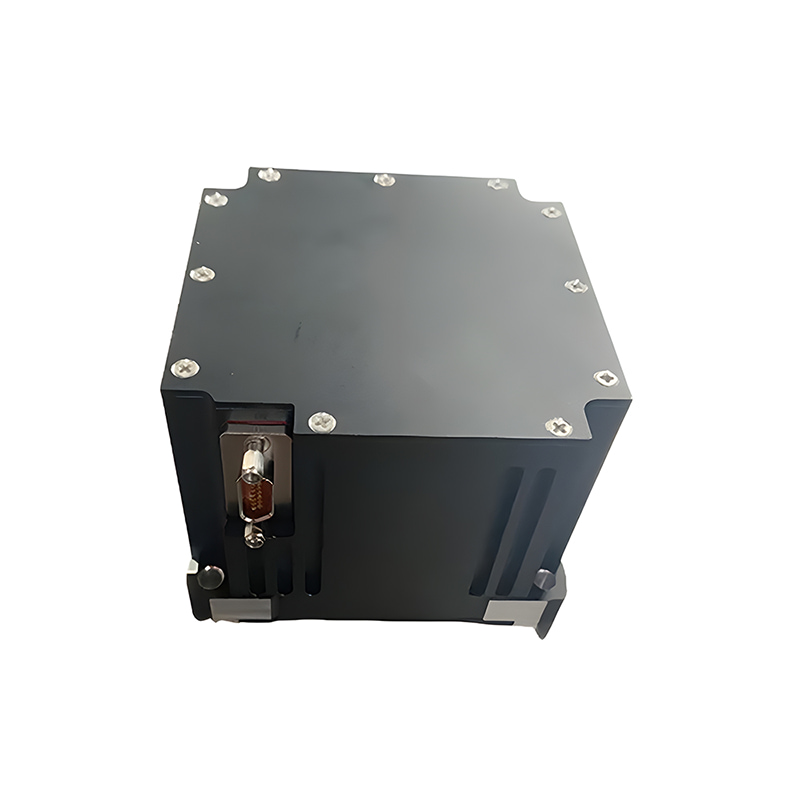
| Размеры | ≤136 мм × 136 мм × 150 мм | |||
| Масса | ≤3,8 кг | Установленный на транспортном средстве (по умолчанию), Воздушно-десантный, Морской | ||
Производственный процесс
Размеры изделия

Сценарии применения



Часто задаваемые вопросы











Xml политика конфиденциальности блог Карта сайта
Авторские права @ Микро-Магия Инк Все права защищены.
 ПОДДЕРЖИВАЕТСЯ СЕТЬ
ПОДДЕРЖИВАЕТСЯ СЕТЬ



 русский
русский