Датчики скорости вращения колес (датчики скорости вращения колес) часто используются в качестве вспомогательных датчиков в инерциальных навигационных системах (ИНС) для повышения точности навигации и подавления накопленных ошибок инерциальных датчиков. Датчик скорости вращения колеса вычисляет продольную скорость транспортного средства, измеряя скорость вращения колеса (в сочетании с радиусом шины и поправкой на коэффициент скольжения), предоставляя независимую информацию о скорости. При потере сигнала GPS (например, в туннелях или подземных гаражах) ИНС может непрерывно оценивать положение транспортного средства методом инерциальной навигации, комбинируя данные о скорости с датчика скорости вращения колеса и сравнивая их с результатами интегрирования акселерометра ИНС для коррекции ошибки скорости. При расчете курса датчик скорости вращения колеса может косвенно вычислять скорость изменения угла курса, измеряя разницу скоростей между левым и правым колесами (разница скоростей вращения колес), обеспечивая компенсацию для калибровки угла курса инерциальной навигации.
На примере изменения угла курса в данной статье кратко рассматривается, как косвенно рассчитать скорость изменения угла курса на основе данных, полученных с помощью измерителя скорости вращения колеса.
В практических приложениях следующие проблемы могут привести к неточным данным измерений датчика скорости вращения колеса, что повлияет на компенсацию погрешности азимутального угла в инерциальной навигационной системе.
Фактическая колесная база может изменяться из-за нагрузки или деформации подвески и требует регулярной калибровки. Приведенная выше формула предполагает симметрию левого и правого колес, поэтому модель необходимо скорректировать для асимметричных транспортных средств.
На мокрой и скользкой дороге, в условиях бездорожья или при резком ускорении или торможении автомобиля может произойти пробуксовка шин, в результате чего разница в скорости вращения колес не будет соответствовать истинной угловой скорости. Поэтому необходимо объединить данные об ускорении и угловой скорости инерциального измерительного блока (IMU) для обнаружения пробуксовки; динамически корректировать вес датчика скорости вращения колес с помощью алгоритма объединения данных с нескольких датчиков (алгоритм фильтра Калмана) для уменьшения влияния пробуксовки на движение.
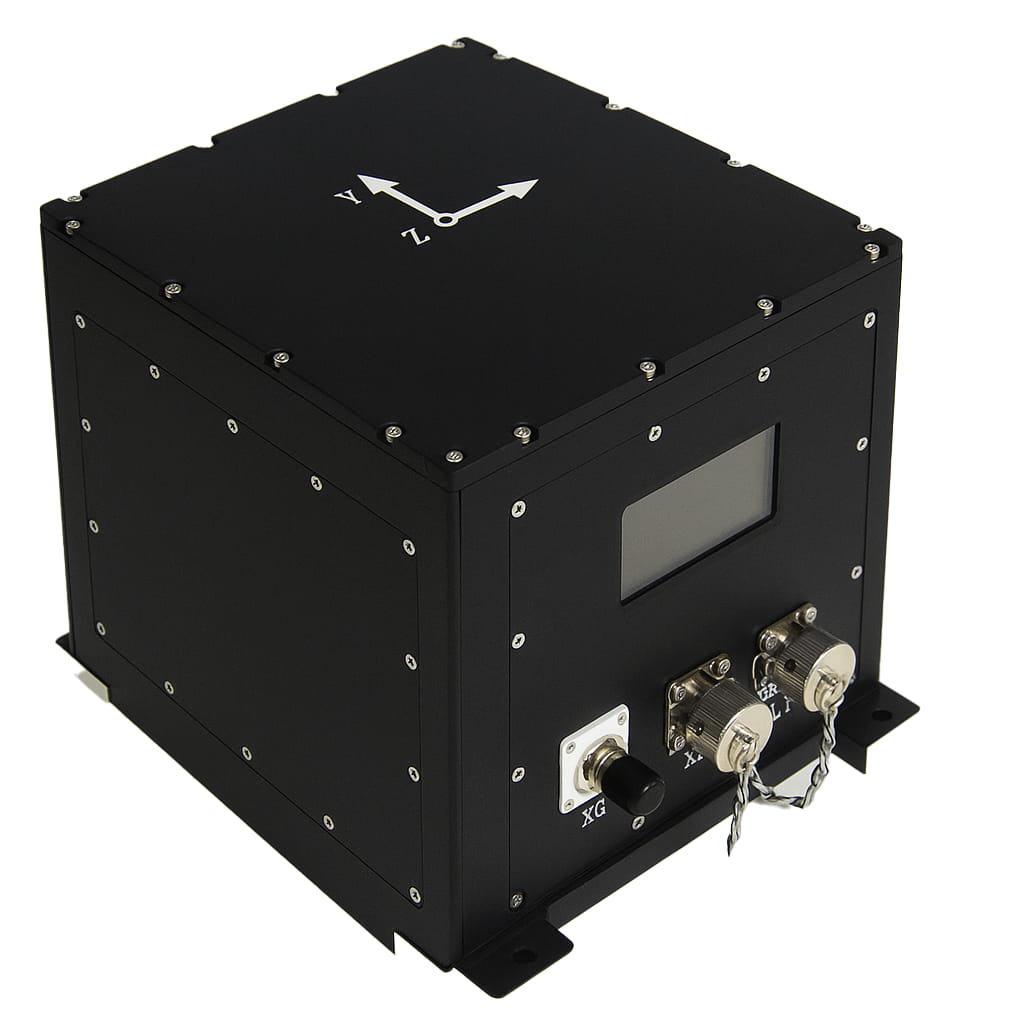
I3500 — это интегрированная навигационная система (GNSS/INS) производства Micro-Magic Inc., состоящая из высокопроизводительных MEMS-датчиков, высокоточных GNSS-систем и высокопроизводительных микропроцессоров. Она может подключаться к внешнему одометру, доплеровскому измерителю скорости (DVL) и другим вспомогательным навигационным устройствам, имеет встроенные высоконадежные интегрированные навигационные алгоритмы и может выдавать информацию в реальном времени, такую как скорость, положение и ориентация несущего объекта.

Ввод/вывод данных
Параметры | Описывать |
Вывод данных | NMEA/RTCM/Novtel SPAN Binary Protocol |
Содержание данных | Угол Эйлера, скорость, положение, ускорение, угловая скорость |
Алгоритм слияния | Расширенный фильтр Калмана |
Внешний датчик | Счётчик пробега, GNSS, DTU |
Индекс интегрированной точности навигации
Позиция | Точность позиционирования | Точность скорости | Подача/Rвсе Aточность |
Доступ к счетчику пробега | 1cm | 0,03 м/с | 0,1° |
1m | 0,1 м/с | 0,1° | |
6m | 0,1 м/с | 0,2° |
Датчик скорости вращения колеса дополняет инерциальную навигационную систему, предоставляя независимую информацию о скорости, что значительно повышает надежность навигации транспортных средств в сложных условиях. Его основные преимущества отражены в:
а. Кратковременная точность: данные о скорости на высоких частотах подавляют накопление ошибок инерциальной навигационной системы.
б. Резервная конструкция: сохранение базовых навигационных возможностей в случае отказа GPS.
с. Экономическая эффективность: Значительное улучшение навигационных характеристик достигается при снижении затрат.
В будущем, с развитием алгоритмов объединения данных с нескольких датчиков, таких как фильтрация с использованием глубокого обучения, применение датчиков скорости вращения колес в системах автономного вождения и беспилотных системах будет еще более широким.

Xml политика конфиденциальности блог Карта сайта
Авторские права @ Микро-Магия Инк Все права защищены.
 ПОДДЕРЖИВАЕТСЯ СЕТЬ
ПОДДЕРЖИВАЕТСЯ СЕТЬ



 русский
русский