AHRS Sensor vs Inertial Navigation System: In-depth Analysis of Differences and Applications
Apr 02, 2025
In the design of navigation and control systems, AHRS (Attitude and Heading Reference System) and INS (Inertial Navigation System) are two key technical modules. Although they are both based on inertial measurement units (IMUs), their processing methods, output results, and application scopes are essentially different.
This article will compare AHRS and INS in depth from the dimensions of system composition, sensor fusion algorithm, mathematical model, error source analysis, and typical applications, to provide theoretical and application support for engineering practice and research.
1. System Structure Overview
AHRS System Structure
AHRS systems are usually composed of three types of sensors:Three-axis gyroscopes (Angular Rate Sensors);Three-axis accelerometers (Linear Acceleration Sensors);Three-axis magnetometers (Earth Magnetic Field Sensors)
These data are fused through a filtering algorithm to estimate the current three-dimensional posture (expressed in Euler angles or quaternions).
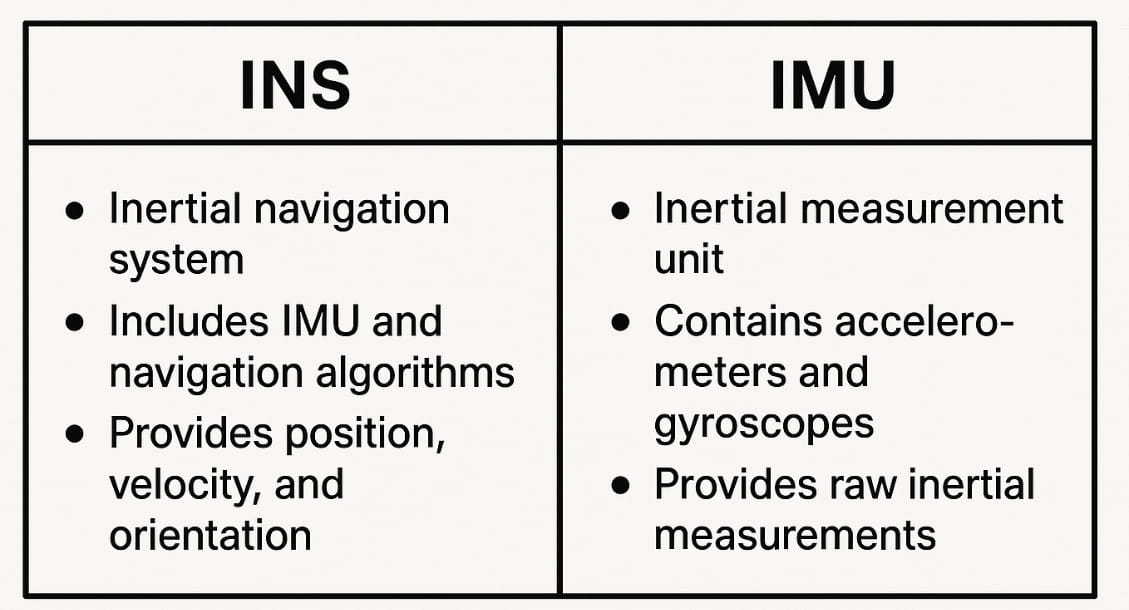
INS system structure
INS systems are usually composed of IMU (gyroscope + accelerometer), and realize navigation functions through integral calculation:
Integrate acceleration to get velocity, and then integrate to get position;
Integrate angular velocity to calculate attitude changes.
INS can be integrated into an "autonomous navigation system" to achieve continuous positioning for a certain period of time even in an environment where GPS is not available.
2. Core Mathematical Formulas and Calculation Process
1. Attitude estimation (AHRS)
Assume that the three-axis angular velocity isUsing quaternionRepresents the posture, then the posture update formula is as follows:
Combined with the magnetometer and accelerometer, attitude error correction is achieved through complementary filtering or extended Kalman filtering (EKF).
Schematic diagram of attitude error correction formula (complementary filtering):
2. Inertial Navigation (INS)
The core of INS is to integrate acceleration twice:
Speed calculation:
Position calculation:
Since the IMU data contains noise and bias, the integration process will lead to the accumulation of errors (drift):
To this end, INS is often fused with GPS, vision, or UWB to constrain error drift.
3. Error model analysis
Error Source
AHRS
INS
Gyroscope Bias
Causes slow attitude drift, correctable via magnetometer
Accumulates into significant drift in attitude, velocity, and position
Accelerometer Error
Affects gravity direction estimation
Severely impacts position estimation; long-term errors grow quadratically
Magnetometer Interference
Impacts yaw (heading) estimation
Generally unaffected (no magnetometer used)
Numerical Integration Error
First-order integration with manageable errors
Second-order integration leads to significant errors
Algorithm Robustness
High (mature attitude decoupling algorithms)
Moderate; requires robust filtering and error modeling
support
4. Comparison of Sensor Fusion Algorithms
Algorithm Type
Typical Usage in AHRS
Typical Usage in INS
Complementary Filtering
Fast attitude fusion for low-computational-power devices
Rarely used (insufficient precision)
Kalman Filter (EKF)
Fuses gyro, accelerometer, and magnetometer to correct errors
Fuses gyro, accelerometer, and external references (e.g., GPS)
Zero-Velocity Update (ZUPT)
Not used
Commonly applied in pedestrian navigation to reduce drift
SLAM/Visual-Inertial Navigation
Not applicable
Combined with visual sensors to enhance navigation accuracy
5. Comparison of Typical Application Scenarios
Application
AHRS
INS
Small UAVs
✅ For attitude control & heading estimation
✅ Used for path planning or in GPS-denied environments
VR/AR Headsets
✅ Provides head orientation tracking
❌ Not required (position accuracy unnecessary)
Autonomous Vehicles
❌ Attitude alone insufficient for navigation
✅ Critical for high-precision map matching and dead reckoning in GPS-denied zones
Rocket Guidance
❌ Insufficient precision for standalone use
✅ High-precision INS required in high-dynamic environments
Underground/Underwater
❌ Magnetometer failure in such environments
✅ Combines with sonar/UWB for precise navigation
6. Summary: A5000 vs I3700: Practical application of high-precision sensors in AHRS and INS
A5000 – High-precision MEMS AHRS attitude sensor
A5000 is a highly integrated digital output high-precision AHRS (attitude and heading reference system). Its core features include:
Built-in three-axis high-precision accelerometer, gyroscope and magnetometer
Use 6-state Kalman filter for sensor fusion to enhance the robustness of attitude estimation
Output includes heading angle (Yaw), pitch angle (Pitch), roll angle (Roll) and angular velocity, acceleration information
Suitable for attitude perception scenarios such as drones, robots, mining vehicles, AGVs, agricultural automation equipment, etc.
Miniature design, suitable for space-constrained applications
I3700 – Full-featured Inertial Navigation System (INS)
In contrast, the I3700 is an inertial navigation system for high-dynamic autonomous navigation applications, integrating a high-performance IMU module and supporting fusion with external signals (such as GPS). Its key features include:
Output attitude angle + velocity + 3D position, supporting long-term navigation
Suitable for scenarios that require full autonomous navigation capabilities, such as underground mines, GPS-free environments, precision agriculture or marine unmanned systems
Supports multiple data interfaces, compatible with SLAM, GPS, and UWB fusion systems
With a powerful digital signal processing unit, it has excellent stability and long-term drift control capabilities
A5000
Heading 9 Axis Navigation System Navigational Guided System Low Price High Accuracy
I3700
High Accuracy Agricultural Gps Tracker Module Consumption Inertial Navigation System Mtk Rtk Gnss Rtk Antenna Rtk Algorithm


 ПОДДЕРЖИВАЕМАЯ СЕТЬ
ПОДДЕРЖИВАЕМАЯ СЕТЬ



 русский
русский





