Продукт: Метод наземного позиционирования с IMU и фиксированной камерой
Ключевые особенности:
Вывод: этот метод повышает точность и эффективность позиционирования, одновременно упрощая калибровку, и имеет потенциал для широкого применения в различных технологических областях.
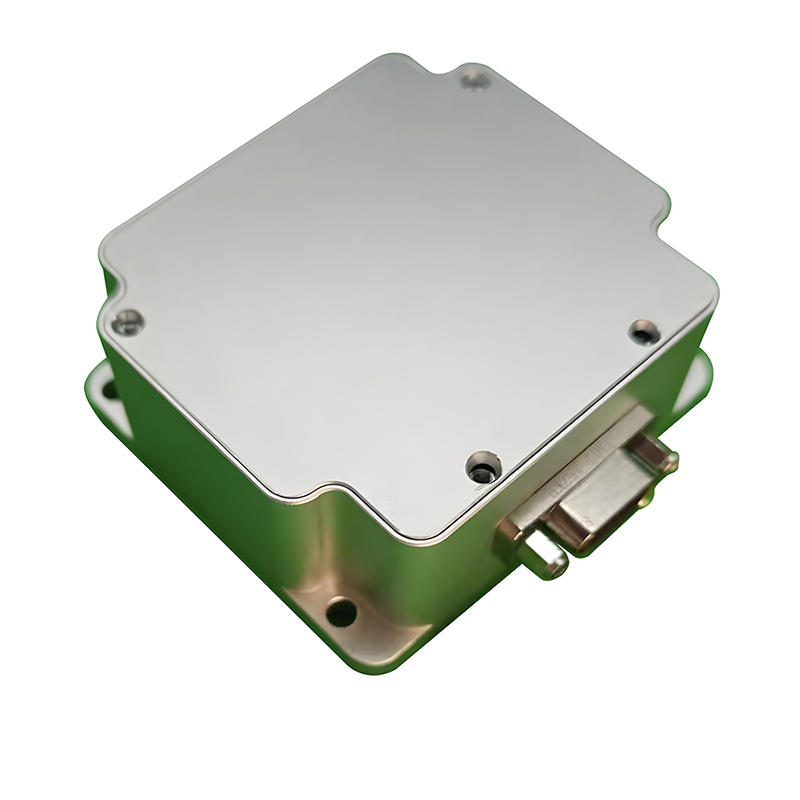
Метод наземного позиционирования, при котором стационарно устанавливаются инерциальный измерительный блок (IMU) и камера. Он сочетает в себе высокоточное измерение ориентации IMU и возможности визуального позиционирования камеры для достижения эффективного и точного позиционирования на земле. Вот подробные этапы метода:
Сначала надежно установите IMU и камеру, чтобы взаимное положение между ними оставалось неизменным. Этот метод установки исключает утомительные этапы калибровки связи между камерой и IMU в традиционном методе и упрощает процесс эксплуатации.
Далее ИДУ используется для измерения ускорения и угловой скорости носителя в инерциальной системе отсчета. IMU содержит датчик ускорения и гироскоп, которые могут определять состояние движения носителя в режиме реального времени. Датчик ускорения отвечает за определение текущей скорости ускорения, а гироскоп обнаруживает изменения направления, угла крена и угла наклона носителя. Эти данные предоставляют ключевую информацию для последующего расчета ориентации и позиционирования.
Затем на основе данных, измеренных IMU, информация об ориентации носителя в навигационной системе координат рассчитывается с помощью интегральной операции и алгоритма решения ориентации. Сюда входят угол рыскания, угол тангажа, угол крена и т. д. носителя. Благодаря высокой частоте обновления IMU рабочая частота может достигать более 100 Гц, что позволяет предоставлять высокоточные данные о положении в реальном времени.
В то же время камера захватывает характерные точки на местности или информацию об ориентирах и генерирует данные изображения. Эти данные изображения содержат богатую пространственную информацию и могут использоваться для обработки данных IMU.
Затем информация об ориентации, предоставленная IMU, объединяется с данными изображения камеры. Сопоставляя характерные точки на изображении с известными точками в географической системе координат в сочетании с данными о положении IMU, можно рассчитать точное положение камеры в географической системе координат.
Наконец, матрица проекции используется для пересечения пересечения нормальной линии и получения пространственного положения цели. Этот метод объединяет данные ориентации IMU и данные изображения камеры для достижения точной оценки целевого пространственного положения путем расчета матрицы проекции и точки пересечения.
Благодаря этому методу можно достичь высокоточного и высокоэффективного позиционирования на местности. Стационарная установка IMU и камеры упрощает процесс эксплуатации и снижает ошибки калибровки. В то же время сочетание высокой частоты обновления IMU и возможности визуального позиционирования камеры повышает точность позиционирования и производительность в реальном времени. Этот метод имеет широкие перспективы применения в таких областях, как дроны, роботы и автономное вождение.
Следует отметить, что, хотя этот метод имеет много преимуществ, в практическом применении на него все же могут влиять некоторые факторы, такие как шум окружающей среды, динамические помехи и т. д. Поэтому в практических приложениях настройку и оптимизацию параметров необходимо выполнять в соответствии с к конкретным условиям для повышения стабильности и надежности позиционирования.
В приведенной выше статье описан метод наземного позиционирования, когда IMU и камера установлены стационарно. В нем кратко описываются высокоточные измерения ориентации IMU и возможности визуального позиционирования камеры, а также возможность достижения эффективного и точного позиционирования на земле. MEMS IMU, независимо разработанный Micro-Magic Inc, имеет относительно высокую точность, например U3000 и U7000, которые являются более точными и являются продуктами навигационного класса. Он может точно определить местонахождение и ориентацию. Если вы хотите узнать больше о IMU, как можно скорее свяжитесь с нашими профессиональными техническими специалистами.

Xml политика конфиденциальности блог Карта сайта
Авторское право
@ Микро-Мэджик Инк Все права защищены.
 ПОДДЕРЖИВАЕМАЯ СЕТЬ
ПОДДЕРЖИВАЕМАЯ СЕТЬ



 русский
русский